Примеры задач
На этой странице представлены некоторые примеры использования RoboDK для моделирования и автономного программирования. Они входят в стандартную поставку RoboDK, которую можно скачать здесь.
Используйте меню Файл-Открыть для загрузки определённого примера.
Выбор и размещение объектов
Автоматизация процесса выбора и размещения объектов ускоряет процесс подбора деталей из одного места и размещения их в другом месте, повышая тем самым эффективность производства.
Обучающее видео показывает процесс моделирования и автономного программирования.
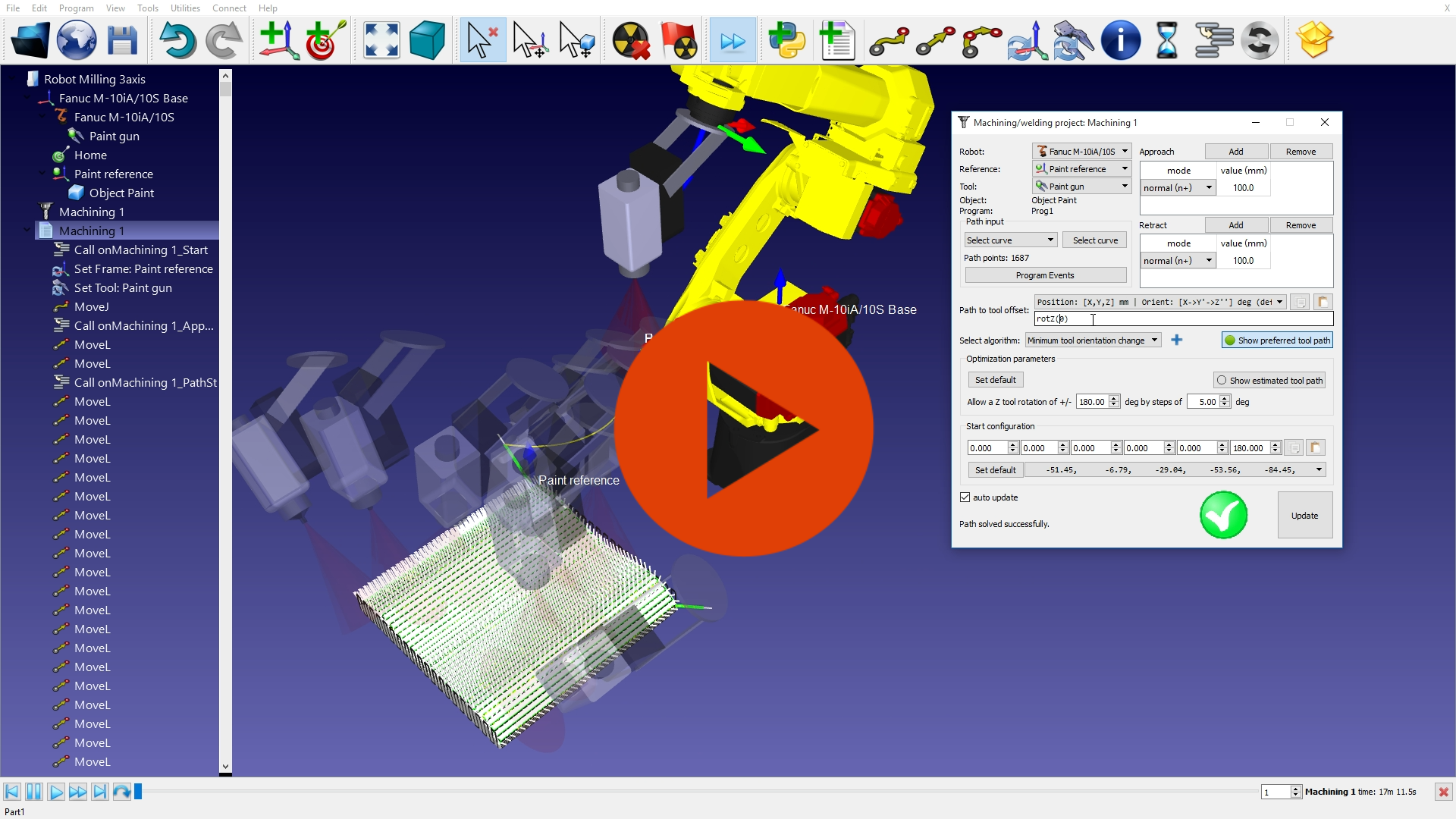
Роботизированная механообработка
Роботизированная механообработка становится всё более популярной в промышленности. RoboDK — это отличное решение для преобразования программ для станков с ЧПУ в программы для роботов.
Наш продукт позволяет легко создавать программы без неопределённых положений (сингулярностей) в пределах рабочей зоны робота с учётом возможных столкновений.
Введение в роботизированную механообработку
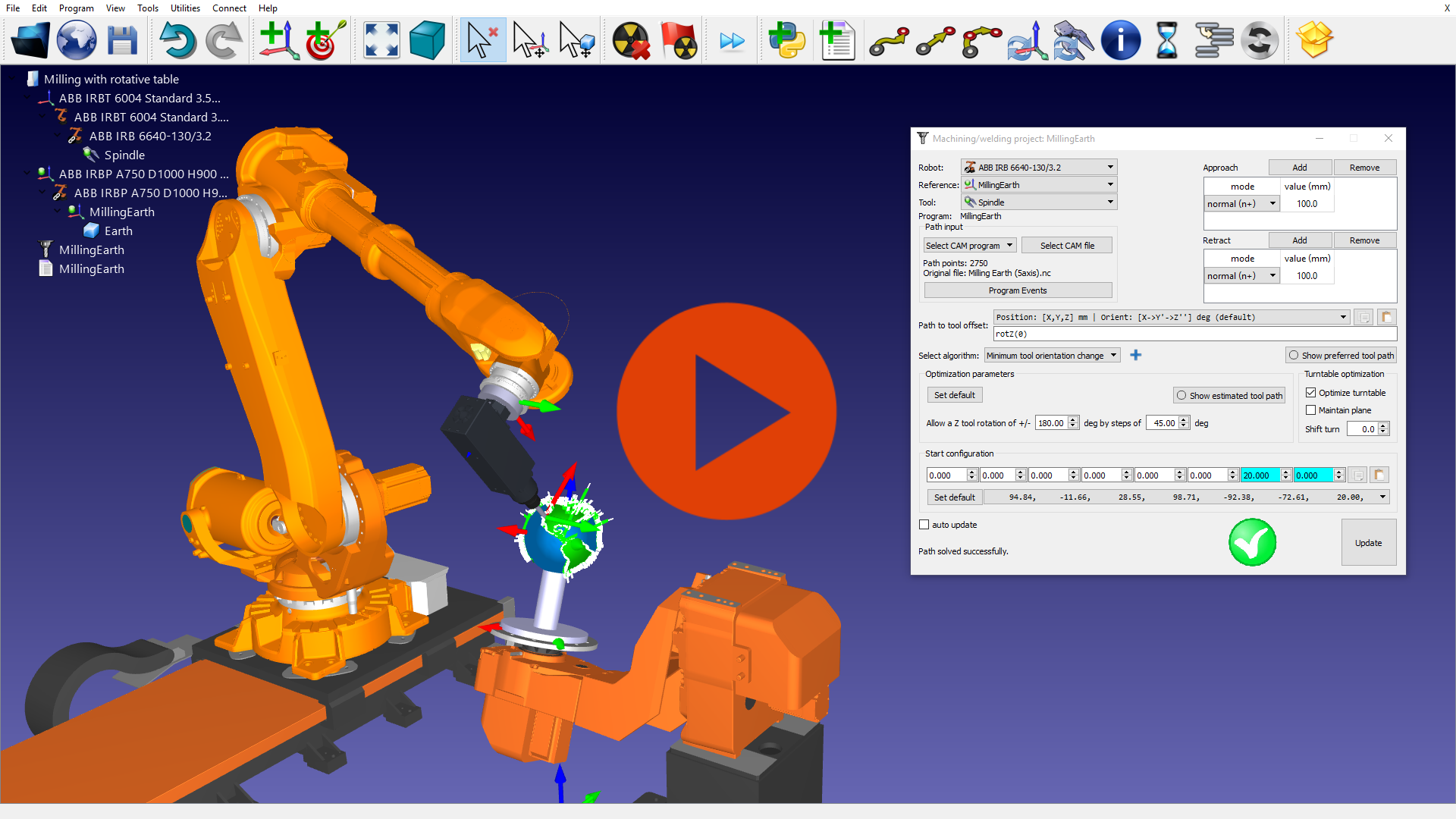
Механообработка с внешними осями
RoboDK допускает моделирование процесса механообработки с использованием дополнительных (внешних) осей, синхронизированных с движениями основного робота. При этом создаются корректные программы и осуществляется оптимизация движения всех осей.
На видео показано применение робота ABB совместно с поворотным столом для обработки сферической детали.
Введение в роботизированную механообработку
Роботизированная покраска
RoboDK способен создавать траектории движения робота на поверхностях для нужд покраски или автоматизированного контроля. При этом автоматически избегаются неопределённые положения (сингулярности), выходы за пределы рабочей зоны и столкновения.
Целевые точки на поверхностях создаются за несколько шагов, а программы управления роботами получаются за считаные минуты.
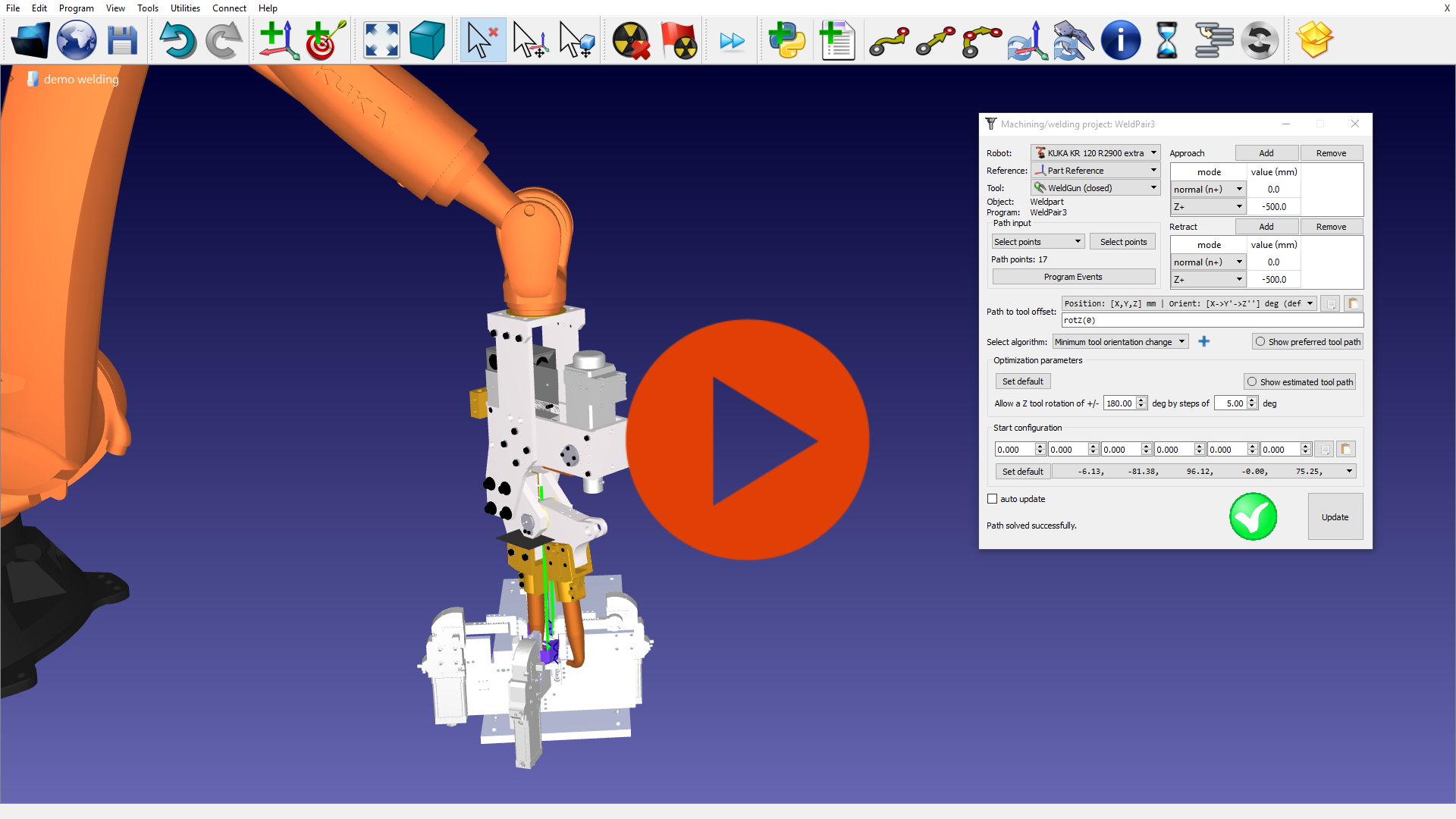
Точечная сварка
Точечная сварка является наиболее распространенным видом роботизированной сварки. Программное обеспечение RoboDK позволяет легко создавать корректные программы для этого процесса.
На видео показан процесс точечной сварки с использованием робота KUKA и сварочных клещей от фирмы HMD Technology.
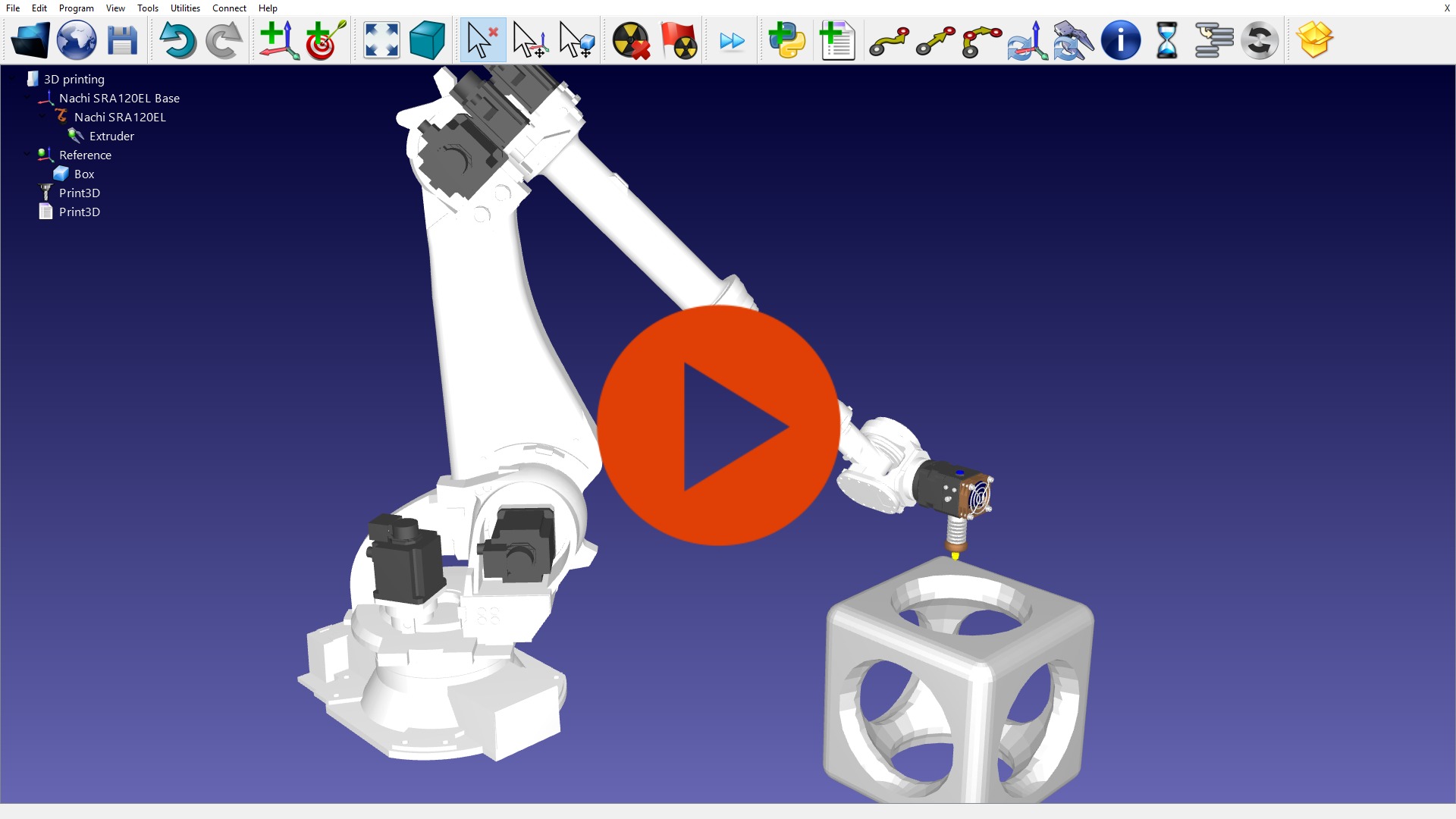
Роботизированная 3D-печать
Роботизированная 3D-печать (аддитивное производство) позволяет изготавливать большие трёхмерные изделия на основе файлов цифровых моделей. RoboDK умеет создавать безошибочные программы управления для использования промышленного робота в качестве трёхосевого или пятиосевого 3D-принтера.
На видео показан процесс трёхмерной печати большой модели с помощью робота Nachi.
Конвейерная лента
Конвейерная лента — это один из типовых механизмов, поддерживаемых RoboDK. Кроме этого, наш продукт поддерживает моделирование поворотных столов, линейных осей и других вспомогательных инструментов.
Данный пример показывает совместную работу двух роботов по загрузке и выгрузке деталей с конвейерной ленты.
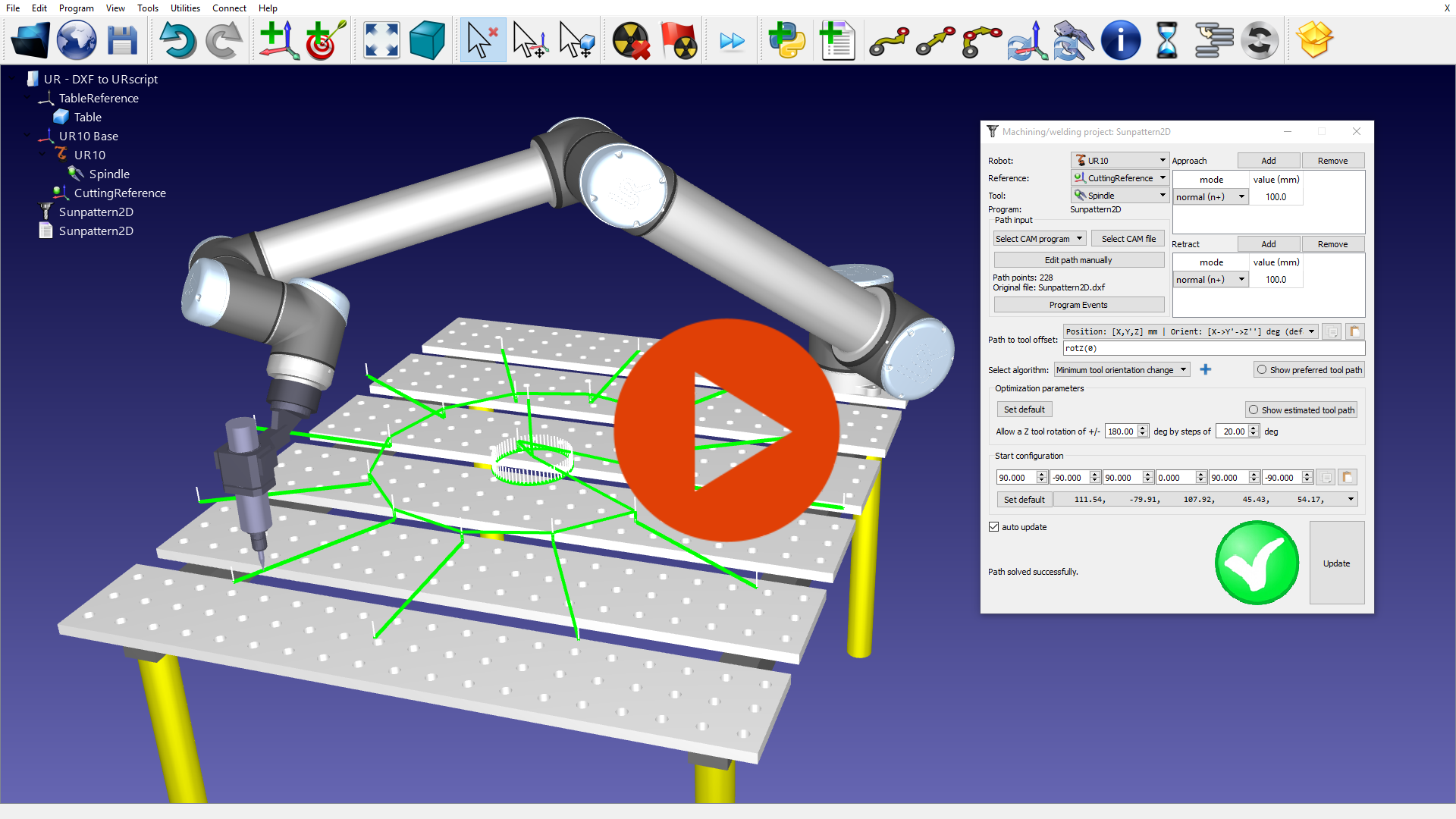
Преобразование DXF в программу для робота
RoboDK умеет создавать программы управления роботами на основе чертежей из файлов DXF.
Например, можно преобразовать DXF в коды ЧПУ для моделирования процесса резания. На видеодемонстрации показано использование DXF-файла для создания управляющей программы робота фирмы UR (на языках SCRIPT или URP).
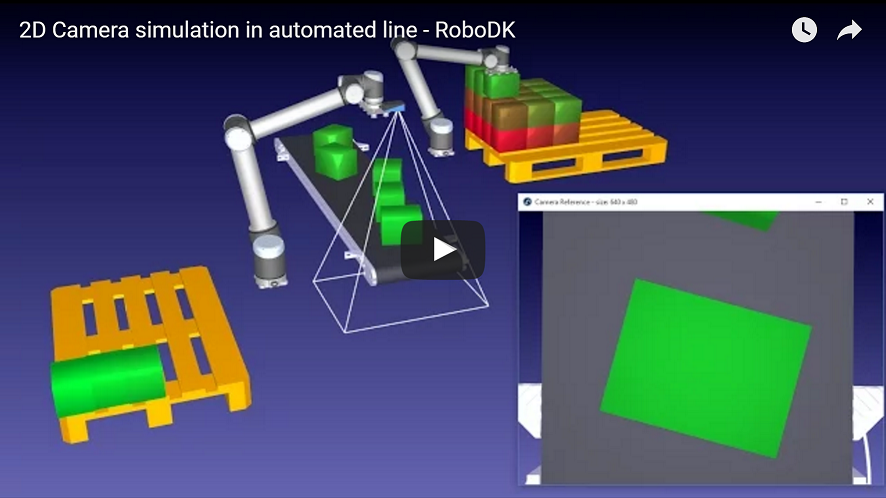
Техническое зрение
Одной из ключевых технологий в задачах выбора и размещения объектов является задача автоматизированного контроля процесса с применением систем технического зрения. RoboDK позволяет моделировать поведение контролирующих камер и делать снимки. Программа позволяет изменять параметры виртуальной камеры, например, менять фокусное расстояние, угол обзора, рабочую дистанцию или размер матрицы. При этом рабочая область камеры может быть визуализирована.
В данном примере промышленные роботы Universal Robots и камера технического зрения выполняют задачу установки объектов на паллеты.
Выбор и размещение объектов с использованием Python
В этом примере показан процесс выбора и размещения объектов, в котором все движения робота и замена объектов выполняются из скрипта на языке программирования Python.
В реализации данного примера используется программный интерфейс Python API, который позволяет взаимодействовать со средой моделирования для программного создания или изменения любых объектов или роботов.
Роботизированное рисование
Программное обеспечение RoboDK способно заставить промышленного робота рисовать картины подобно художнику.
Это возможно с применением RoboDK API и сторонних библиотек, которые способны преобразовать векторные изображения в формате SVG в траектории движения робота.
