KoinèWall
designed by Mandalaki Studio
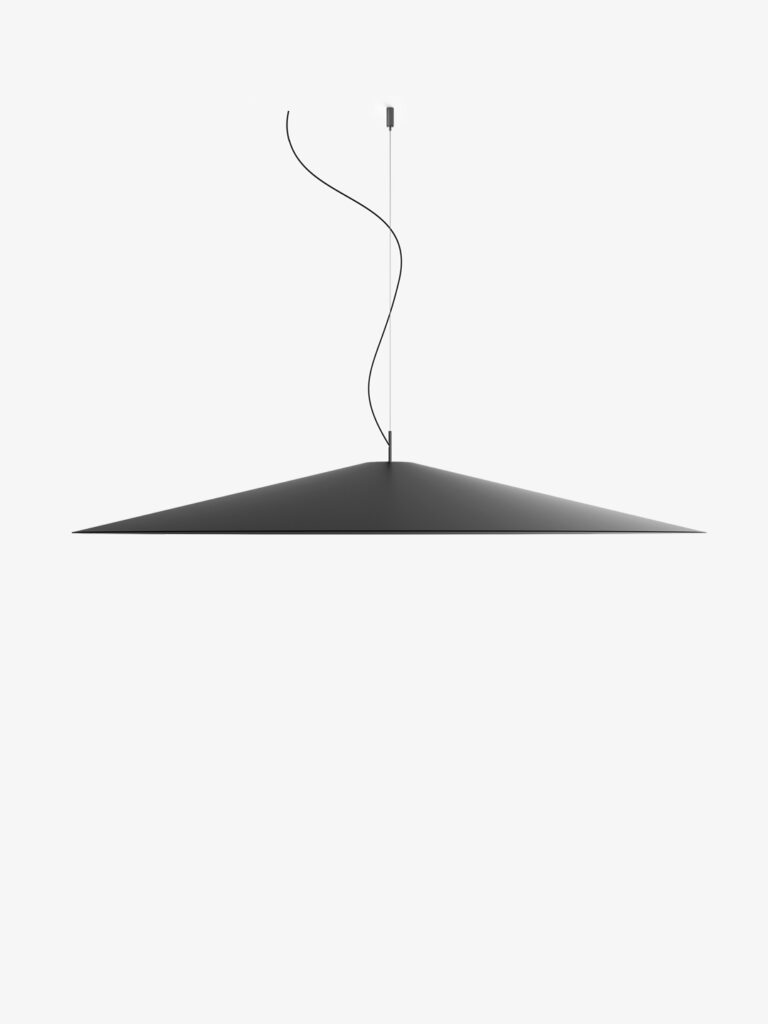
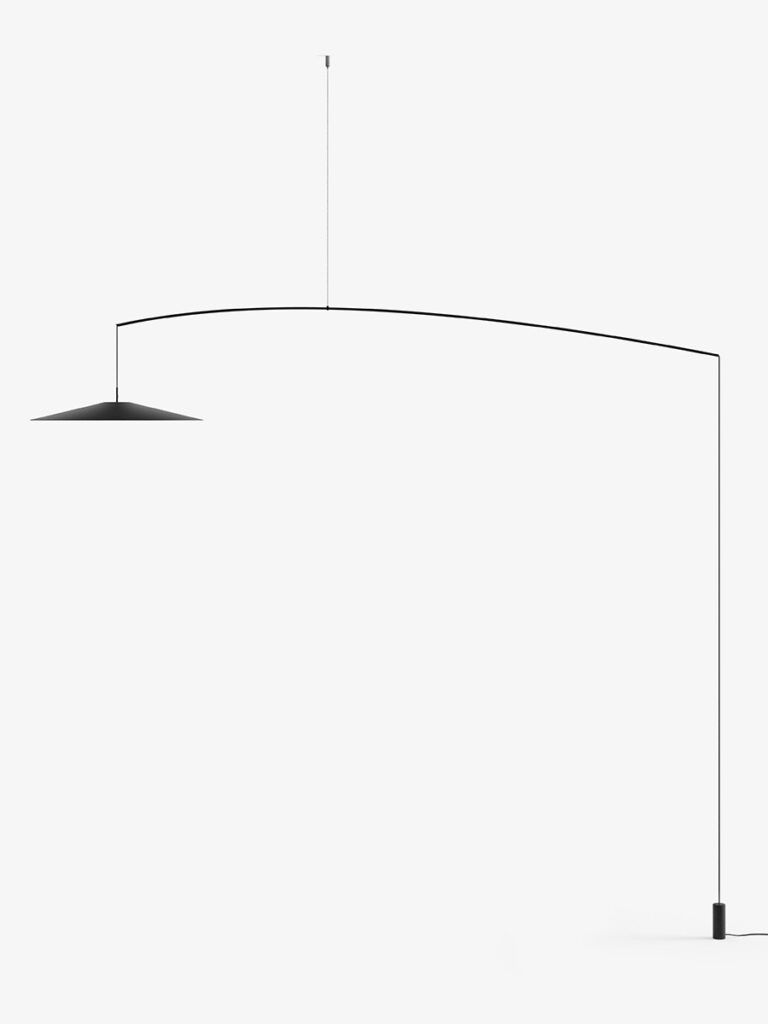
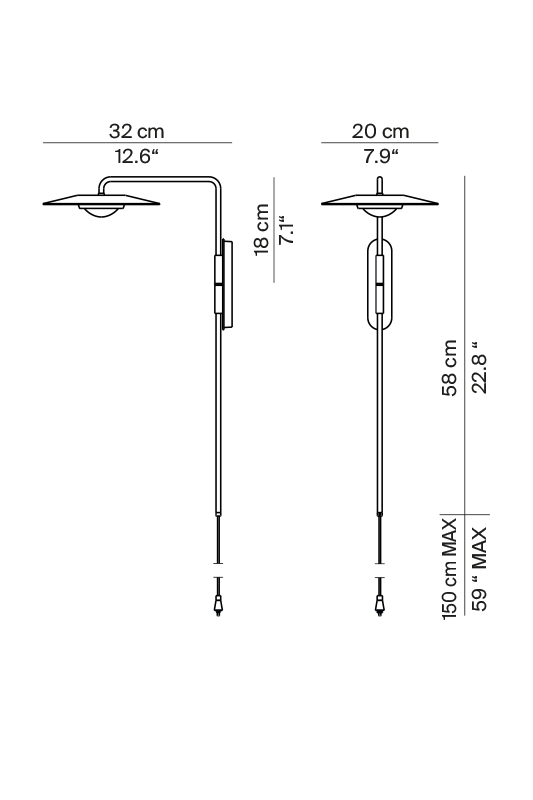
The Koinè family of lamps designed by Mandalaki Studio for Luceplan has grown. The new wall version with plug attachment has a structure composed of a slender stem (8 mm), anchored to the wall by means of a specific support for the reflector (Ø 20 cm) with its characteristic conical form. The light source, equipped with a lens in mineral glass, provides a wide cone of light with clearly defined contours. The on-off function is based on touch control using the stem.
Models

A07A20W A07A20
Koinè
A07A20W A07A20
Koinè
Main specifications
| Typology | Wall | ||
|---|---|---|---|
| Application | Indoor | ||
| Material |
|
||
| Finishes |
|
||
| Dimensions (mm) | H 580, L 320, W 200 | ||
| Light Source | LED 12W, 2700K, 3000K, CRI 90 | ||
| Insulation Class | III |
Related products