



AlibelSistema binario
designed by Alessandro Zambelli
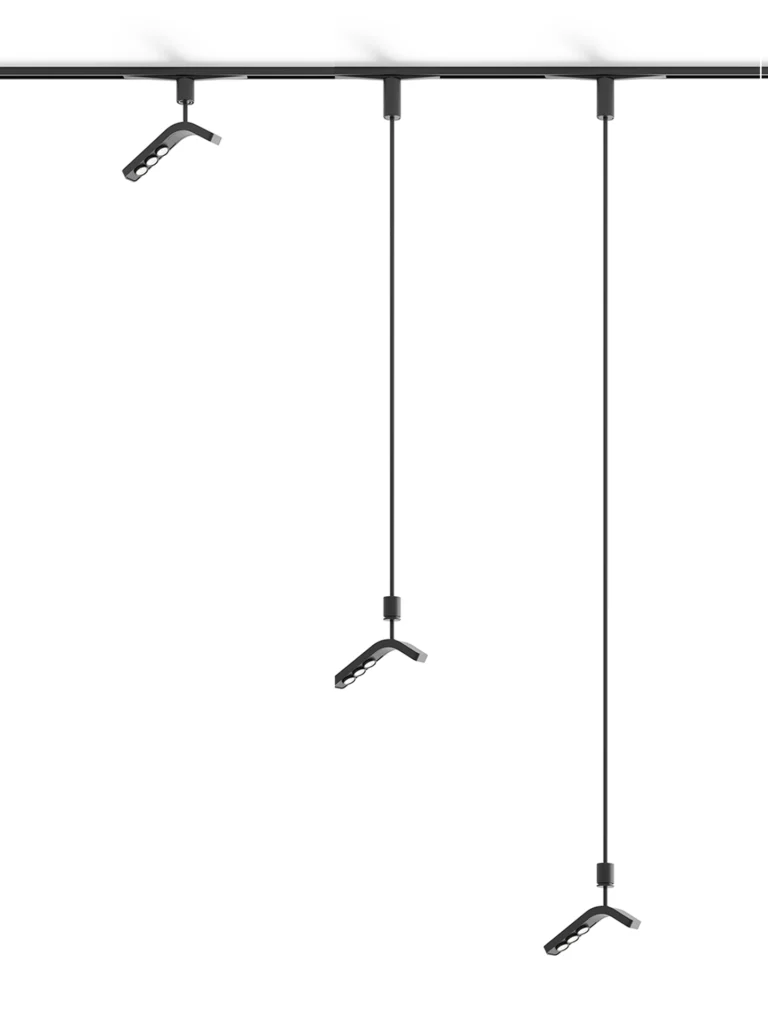
Questo sistema di lampade mette a disposizione due moduli luminosi in grado di generare una luce diffusa quanto una luce d’accento – direzionabile grazie ad uno snodo sferico – e possono essere corredati da un sottile e leggero diffusore di forma ellittica.
Sia la versione simmetrica, ad emissione verso l’altro, che quella asimmetrica, ad emissione verso il basso, possono essere collegate per mezzo di un pratico adattatore e una semplice azione al sottile binario, che trova una nuova declinazione e un sempre maggiore numero di configurazioni possibili.
Un sistema versatile quindi, con un impatto luminoso che cambia in base al dispositivo utilizzato, all’inclinazione dello stesso e alla presenza o meno del diffusore.
Modelli

Alibel Sistema binario
Ottica opale diretta
Alibel Sistema binario
Ottica spot diretta


Alibel Sistema binario
Ottica opale indiretta con diffusore

A13B0DO A13BCDO A13BLDO A13WB0DO A13WBCDO A13WBLDO
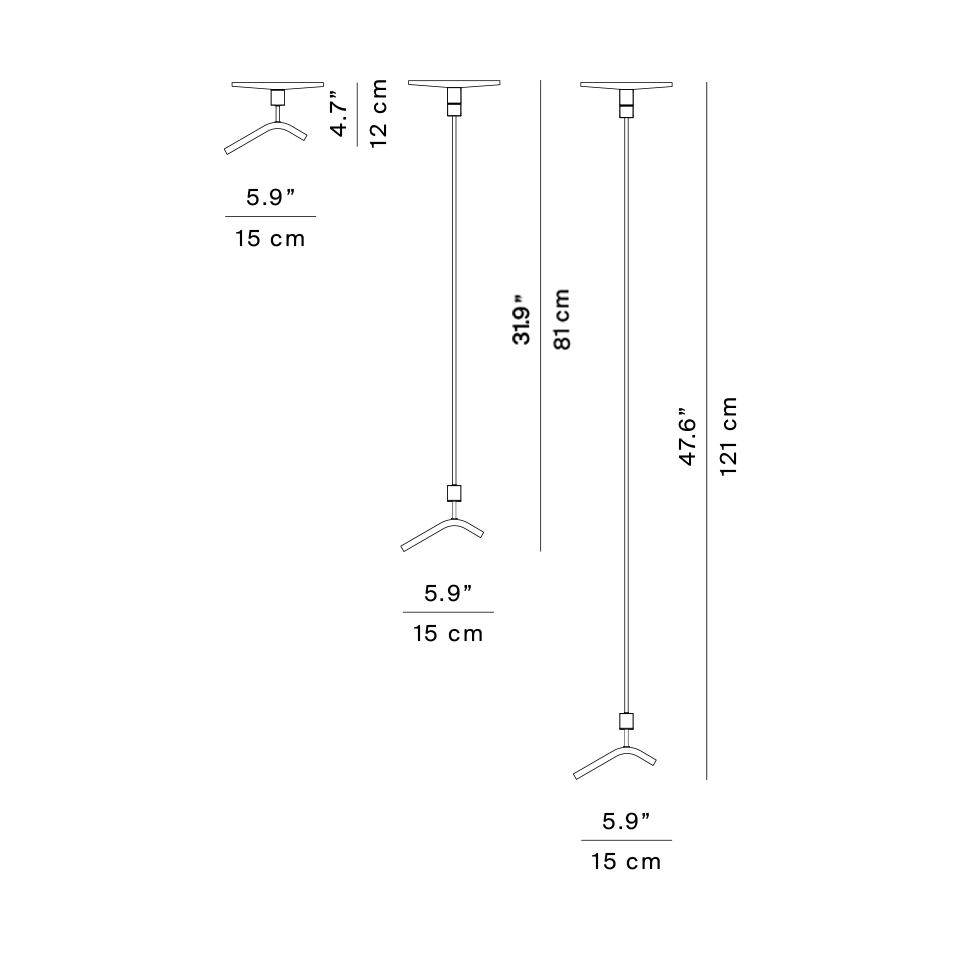
Alibel Ottica opale diretta
A13B0DO A13BCDO A13BLDO A13WB0DO A13WBCDO A13WBLDO
Alibel Ottica opale diretta
Specifiche principali
| Typology | Sistema binario | ||
|---|---|---|---|
| Application | Interno | ||
| Material |
|
||
| Finishes |
|
||
| Dimensions (mm) | H 120 / 810 / 1210, L 150, W 23 | ||
| Weight (kg) | 0.16 | ||
| Light Source | LED 2W, 3000K, 2700K, CRI 90 | ||
| Insulation Class | III |
Download
A13B0DL A13BCDL A13BLDL A13WB0DL A13WBCDL A13WBLDL
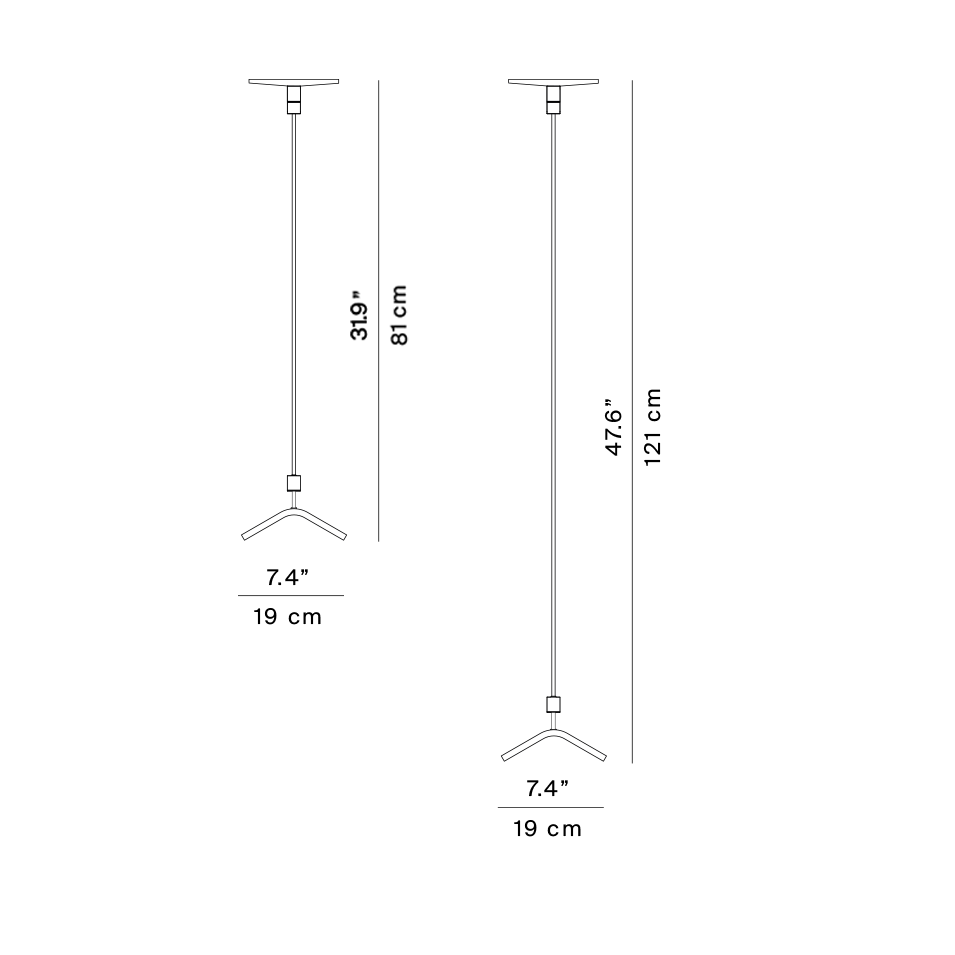
Alibel Ottica spot diretta

A13B0DL A13BCDL A13BLDL A13WB0DL A13WBCDL A13WBLDL
Alibel Ottica spot diretta
Specifiche principali
| Typology | Sistema binario | ||
|---|---|---|---|
| Application | Interno | ||
| Material |
|
||
| Finishes |
|
||
| Dimensions (mm) | H 120 / 810 / 1210, L 150, W 23 | ||
| Weight (kg) | 0.16 | ||
| Light Source | LED 9W, 3000K, 2700K, CRI 90 | ||
| Insulation Class | III |
Download
A13BCU2 A13WBCU2 A13BLU2 A13WBLU2
Alibel Ottica opale indiretta
A13BCU2 A13WBCU2 A13BLU2 A13WBLU2
Alibel Ottica opale indiretta
Specifiche principali
| Typology | Sistema binario | ||
|---|---|---|---|
| Application | Interno | ||
| Material |
|
||
| Finishes |
|
||
| Dimensions (mm) | H 810 / 1210, L 150, W 23 | ||
| Weight (kg) | 0.34 | ||
| Light Source | LED 6W, 3000K, 2700K, CRI 90 | ||
| Insulation Class | III |
Download
A13BCU2 + A13/1 A13BLU2 + A13/1 A13WBCU2 + A13/1
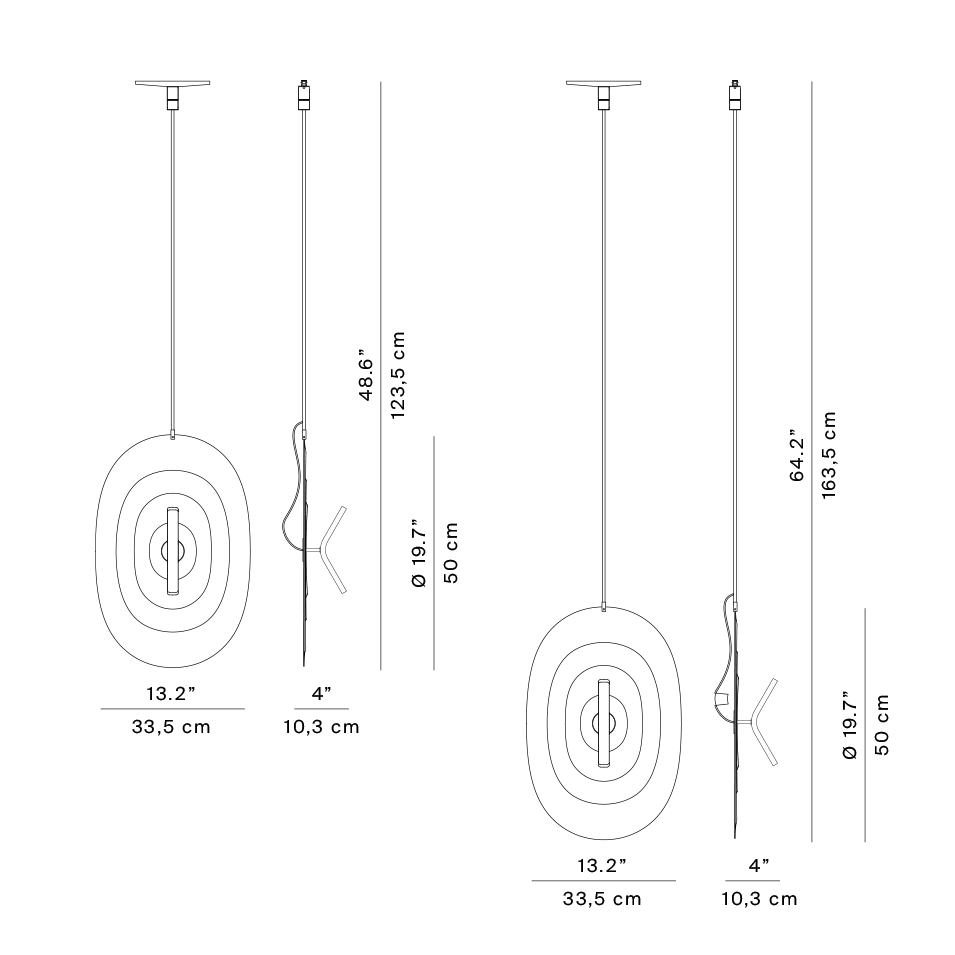
Alibel Ottica opale indiretta con diffusore

A13BCU2 + A13/1 A13BLU2 + A13/1 A13WBCU2 + A13/1
Alibel Ottica opale indiretta con diffusore
Specifiche principali
| Typology | Sistema binario | ||
|---|---|---|---|
| Application | Interno | ||
| Material |
|
||
| Finishes |
|
||
| Dimensions (mm) | H 810 / 1210, L 500, W 335 | ||
| Weight (kg) | 0.65 | ||
| Light Source | LED 6W, 3000K, 2700K, CRI 90 | ||
| Insulation Class | III |
A13BLV5 A13WBLV5 A13BCV5 A13WBCV5
Alibel Diffusore verticale
A13BLV5 A13WBLV5 A13BCV5 A13WBCV5
Alibel Diffusore verticale
Specifiche principali
| Typology | Sistema binario | ||
|---|---|---|---|
| Application | Interno | ||
| Material |
|
||
| Finishes |
|
||
| Dimensions (mm) | H 1230 / 1630, L 150, W 23 | ||
| Weight (kg) | 0.75 | ||
| Light Source | LED 6W, 3000K, 2700K, CRI 90 | ||
| Insulation Class | III |
Come linee eleganti e sottili, i binari formano figure geometriche sul soffitto, pronte a personalizzare lo spazio e ad adattarsi alle diverse esigenze di installazione, mentre i volumi luminosi seguono le specifiche del progetto illuminotecnico.
Il sistema di lampade Alibel, progettato da Alessandro Zambelli, segna l’inizio di una nuova linea di ricerca sulla creazione di illuminazione a binario.
Leggi la storia
Prodotti correlati







