



MeshSospensione
designed by Francisco Gomez Paz
Una lampada dal forte impatto scenografico, la cui struttura leggera, quasi trasparente, composta da una rete di cavi flessibili all’incrocio dei quali sono posizionate le sorgenti LED, nasconde le complessità del progetto e, smaterializzandosi, lascia spazio soltanto alla luce, unica e vera protagonista. Disponibile in tre differenti dimensioni (diametro 55, 80 e 100 cm), con 5 differenti lunghezze (da 1 a 5m di cavi), la sospensione Mesh garantisce una distribuzione ottimale della luce negli ambienti.
Mesh si è inoltre rinnovata con il sistema CASAMBI. L’impiego di Casambi consente di integrare Mesh in un sistema di controllo ampiamente diffuso e dedicato al mondo del lighting, usufruendo di un’interazione semplificata.
Per maggiori informazioni sul sistema CASAMBI: Videos Archive – Casambi

D86C551 D86C555 D86S051 D86S055
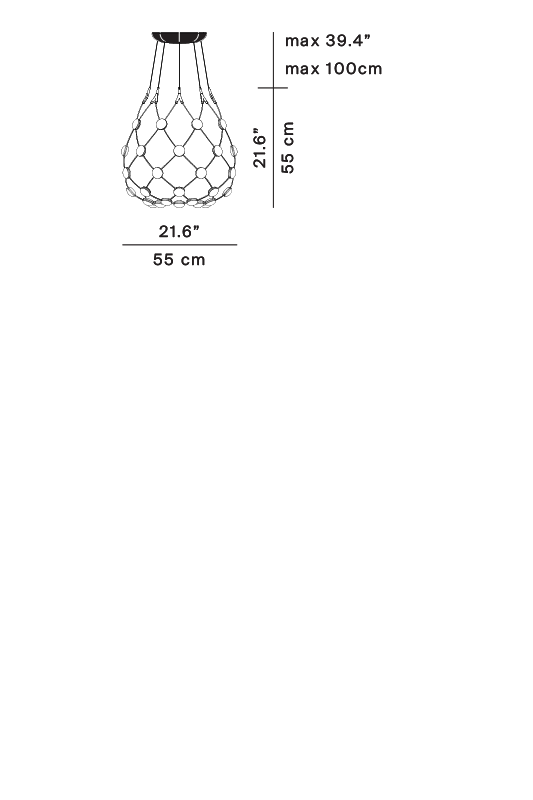
Mesh Ø 55
D86C551 D86C555 D86S051 D86S055
Mesh Ø 55
Specifiche principali
| Typology | Sospensione | ||
|---|---|---|---|
| Application | Interno | ||
| Material |
|
||
| Finishes |
|
||
| Dimensions (mm) | H body 550, cable 1m, D ø 550 | ||
| Weight (kg) | 2.5 | ||
| Light Source | LED 39W, 2700K, CRI 90 | ||
| Insulation Class | I |
D86KT081 D86KT082 D86KT083 D86KT084 D86KT085 D86S081 D86S082 D86S083 D86S084 D86S085
Mesh Ø 80
D86KT081 D86KT082 D86KT083 D86KT084 D86KT085 D86S081 D86S082 D86S083 D86S084 D86S085
Mesh Ø 80
Specifiche principali
| Typology | Sospensione | ||
|---|---|---|---|
| Application | Interno | ||
| Material |
|
||
| Finishes |
|
||
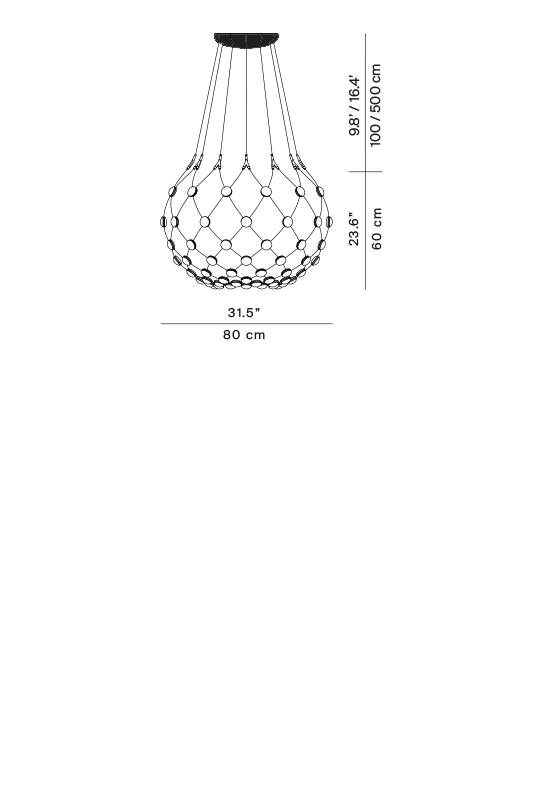
| Dimensions (mm) | H body 600, cable from 1m to 5m, D ø 800 | ||
| Weight (kg) | 4.2 | ||
| Light Source | LED 53W (phase cut), LED 50W (Casambi), 2700K, CRI 90 | ||
| Insulation Class | I |
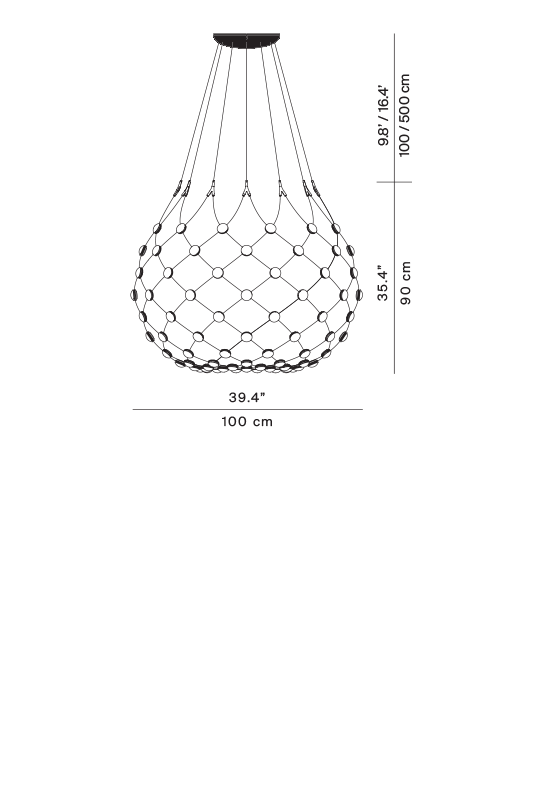
D86KT101 D86KT102 D86KT103 D86KT104 D86KT105 D86S105 D86S104 D86S103 D86S102 D86S101
Mesh Ø 100
D86KT101 D86KT102 D86KT103 D86KT104 D86KT105 D86S105 D86S104 D86S103 D86S102 D86S101
Mesh Ø 100
Specifiche principali
| Typology | Sospensione | ||
|---|---|---|---|
| Application | Interno | ||
| Material |
|
||
| Finishes |
|
||
| Dimensions (mm) | H body 900, cable from 1m to 5m, D ø 1000 | ||
| Weight (kg) | 5.15 | ||
| Light Source | LED 61W, 2700K, CRI 90 | ||
| Insulation Class | I |
Get inspired

Una lampada a sospensione che offre molteplici scenari di illuminazione per prestazioni estetiche e funzionali personalizzate. Basata sulla sperimentazione delle potenzialità dei LED, una tecnologia che permette la separazione in unità molto piccole, Mesh è un progetto scenografico e altamente innovativo che si inserisce perfettamente in qualsiasi ambiente.
Offriamo soluzioni per ogni spazio, sia pubblico che privato. Scoprite le nostre referenze e lasciatevi ispirare.
Get inspired
Prodotti correlati



