


Counterbalance SpotSoffitto Parete
designed by Daniel Rybakken
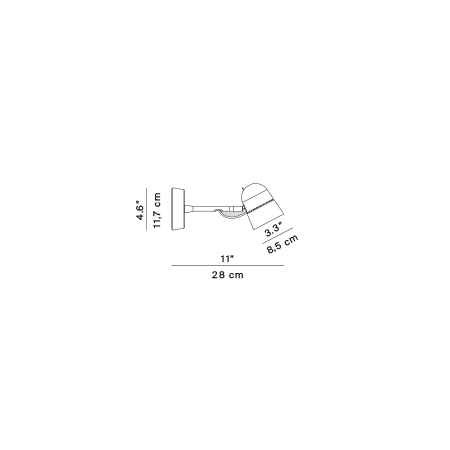
Nella declinazione spot a parete o soffitto, la lampada Counterbalance, priva del lungo braccio e del sistema di bilanciamento che ne contraddistingue le versioni d’origine a parete, conserva il caratteristico riflettore orientabile a calotta.
Modelli

D73NA1
Counterbalance Spot
D73NA1
Counterbalance Spot
Specifiche principali
| Typology | Soffitto, Parete | ||
|---|---|---|---|
| Application | Interno | ||
| Material |
|
||
| Finishes |
|
||
| Dimensions (mm) | W 280, D ceiling rose ø 120, head ø 85 | ||
| Weight (kg) | 0.85 | ||
| Light Source | LED 12W, 2700K, CRI 90 | ||
| Insulation Class | I |
Prodotti correlati



