



CounterbalanceParete
designed by Daniel Rybakken
Un oggetto che sembra sfidare le leggi della fisica. Orientabile a piacere nello spazio, l’essenziale lampada LED Counterbalance evoca, nel suo assetto variabile, il dinamico equilibrio di una scultura mobile. La lampada è realizzata in acciaio verniciato nero opaco o rosso con testa a calotta in alluminio.
Modelli

D73N
Counterbalance

D73N
Counterbalance
Specifiche principali
| Typology | Parete | ||
|---|---|---|---|
| Application | Interno | ||
| Material |
|
||
| Finishes |
|
||
| Dimensions (mm) | H 240-2220, L 85, W 710-1990 | ||
| Weight (kg) | 5.31 | ||
| Light Source | LED 16W, 2700K, CRI 90 | ||
| Insulation Class | III |
Download
Insights
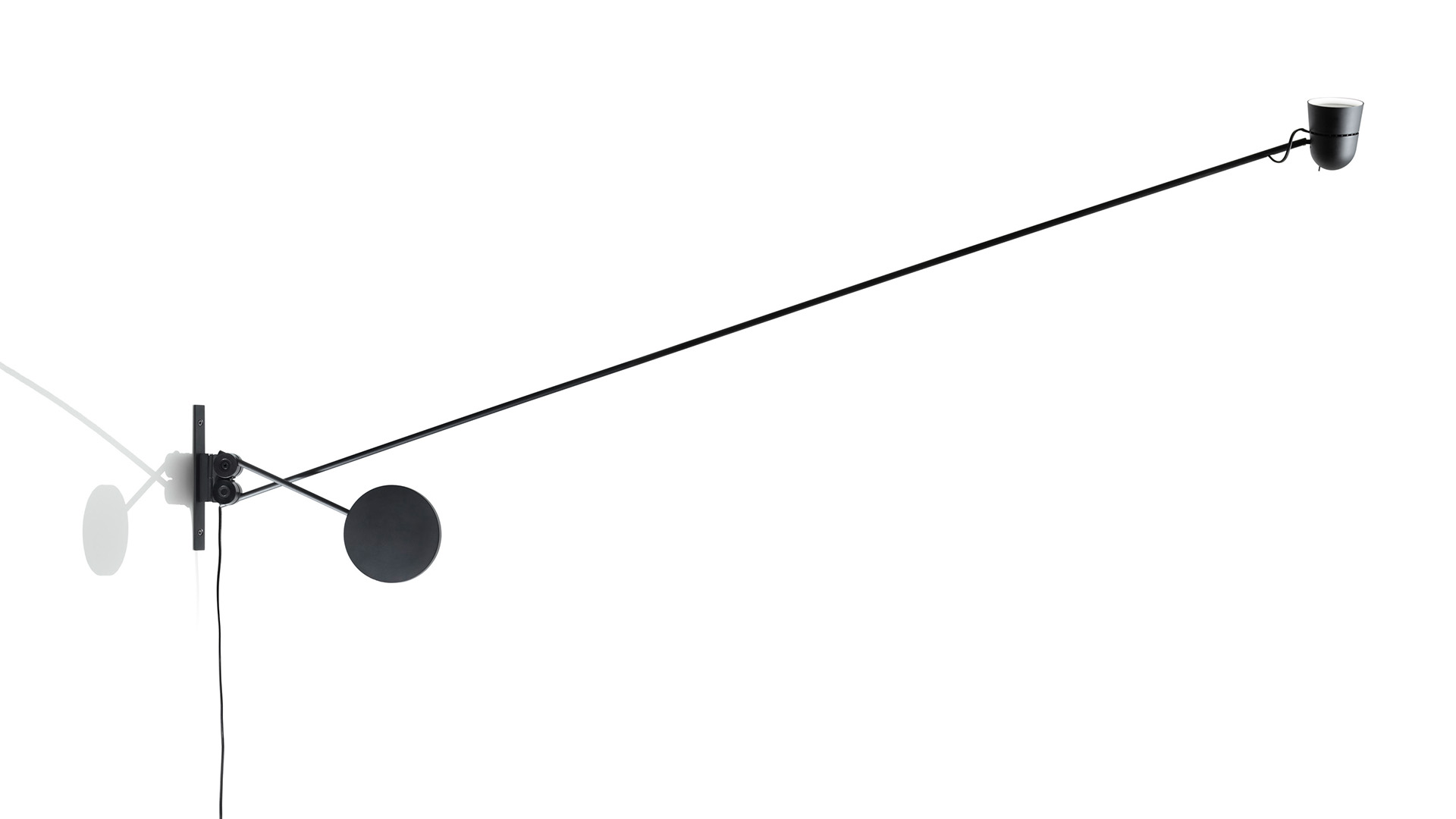
Provvista di un fluido sistema di bilanciamento mediante ruote dentate, il contrappeso compensa i movimenti del lungo braccio e garantisce la stabilità dell’elemento diffusore.

Prodotti correlati



