


CostanzaTavolo
designed by Paolo Rizzatto
Coniugando tradizione e tecnologia, Costanza declina il classico in forma contemporanea. Il paralume intercambiabile di policarbonato diffonde una luce calda e gradevole. Il dimmer sensoriale ad astina permette di regolare l’accensione e lo spegnimento passando per quattro livelli di intensità luminosa.




D13 D13c
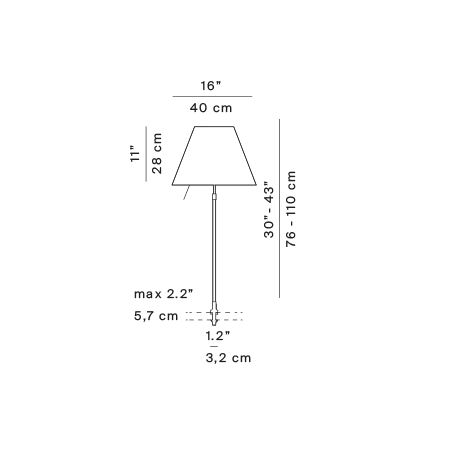
Costanza stelo telescopico – dimmer

D13 D13c
Costanza stelo telescopico – dimmer
Specifiche principali
| Typology | Tavolo | ||||
|---|---|---|---|---|---|
| Application | Interno | ||||
| Material |
|
||||
| Finishes |
|
||||
| Dimensions (mm) | H min 760 – max 1100, L base 180, W 180, D shade ø 400 | ||||
| Weight (kg) | 2.03 | ||||
| Light Source | LED E27 dimmable, HSGA max 105W E27 | ||||
| Insulation Class | II |
D13i
Costanza stelo telescopico – on/off

D13i
Costanza stelo telescopico – on/off
Specifiche principali
| Typology | Tavolo | ||||
|---|---|---|---|---|---|
| Application | Interno | ||||
| Material |
|
||||
| Finishes |
|
||||
| Dimensions (mm) | H 800, L base 180, W 180, D shade ø 400 | ||||
| Weight (kg) | 2.2 | ||||
| Light Source | LED E27, HSGA max 105W E27 | ||||
| Insulation Class | II |
D13if
Costanza stelo fisso – on/off

D13if
Costanza stelo fisso – on/off
Specifiche principali
| Typology | Tavolo | ||||
|---|---|---|---|---|---|
| Application | Interno | ||||
| Material |
|
||||
| Finishes |
|
||||
| Dimensions (mm) | H 800, L base 180, W 180, D shade ø 400 | ||||
| Weight (kg) | 1.99 | ||||
| Light Source | LED E27, HSGA max 105W E27 | ||||
| Insulation Class | II |
D13pt
Costanza perno – dimmer
D13pt
Costanza perno – dimmer
Specifiche principali
| Typology | Tavolo | ||||
|---|---|---|---|---|---|
| Application | Interno | ||||
| Material |
|
||||
| Finishes |
|
||||
| Dimensions (mm) | H min 760 – max 1100, D shade ø 400 | ||||
| Weight (kg) | 0.54 | ||||
| Light Source | LED E27 dimmable, HSGA max 105W E27 | ||||
| Insulation Class | II |
D13pti
Costanza perno – on/off

D13pti
Costanza perno – on/off
Specifiche principali
| Typology | Tavolo | ||||
|---|---|---|---|---|---|
| Application | Interno | ||||
| Material |
|
||||
| Finishes |
|
||||
| Dimensions (mm) | H min 760 – max 1100, D shade ø 400 | ||||
| Weight (kg) | 0.54 | ||||
| Light Source | LED E27, HSGA max 105W E27 | ||||
| Insulation Class | II |
Prodotti correlati




