



Compendium PlateSoffitto Parete
designed by Daniel Rybakken
Compendium Plate è un’ulteriore estensione dell’alfabeto luminoso della famiglia Compendium, declinata ora da Daniel Rybakken anche in versione plafoniera e applique. Il suo profilo esterno in estruso di alluminio anodizzato mantiene la sottigliezza dello spessore originario, creando una superficie quasi complanare alla parete. Nonostante le sue dimensioni estremamente sottili, Compendium Plate garantisce una straordinaria efficienza luminosa unita a grande pulizia formale e ad un’estrema eleganza.
Modelli

D81P2W D81P2
Compendium Plate
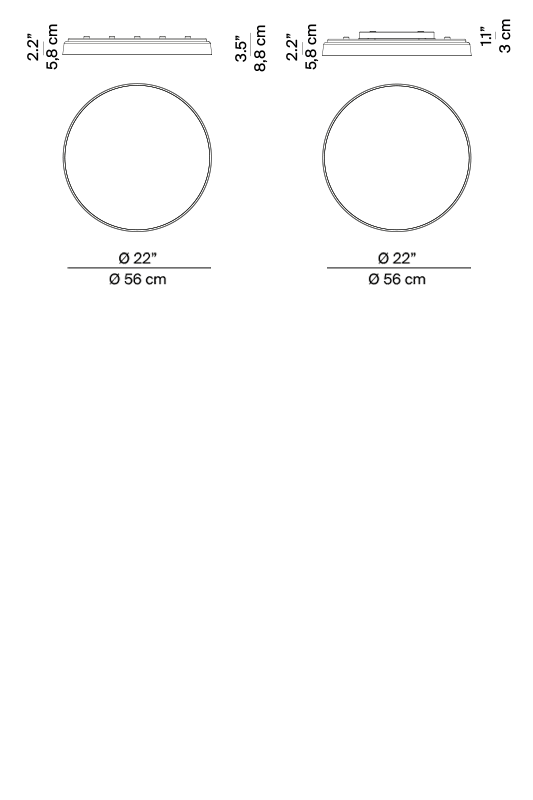
D81P2W D81P2
Compendium Plate
Specifiche principali
| Typology | Soffitto, Parete | ||||
|---|---|---|---|---|---|
| Application | Interno | ||||
| Material |
|
||||
| Finishes |
|
||||
| Dimensions (mm) | H 58, 88 (with ceiling rose), D 560 | ||||
| Weight (kg) | 4.5 | ||||
| Light Source | 39W (only light source – for more details, download datasheet), 2700K, 3000K, CRI 90 | ||||
| Insulation Class | III |
Prodotti correlati





