


CarraraTerra
designed by Alfredo Häberli
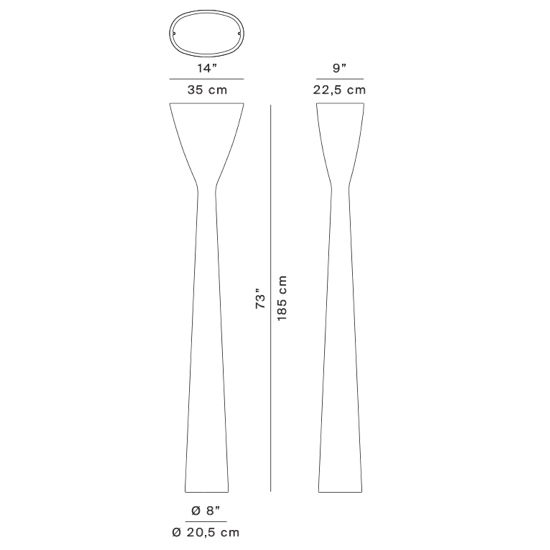
Stampata in un unico corpo di poliuretano espanso, Carrara è un Luminator scultoreo ed essenziale. Diffonde una luce indiretta comandata da un regolatore dell’intensità.
Modelli

D38L
Carrara
D38L
Carrara
Specifiche principali
| Typology | Terra | ||
|---|---|---|---|
| Application | Interno | ||
| Material |
|
||
| Finishes |
|
||
| Dimensions (mm) | H 1850, L 350, W 225 | ||
| Weight (kg) | 16.2 | ||
| Light Source | LED 45W, 3000K, CRI 80 | ||
| Insulation Class | II |