Add-In RoboDK pour Rhino
L’add-in RoboDK pour Rhino vous permet de combiner la modélisation paramétrique de Rhino avec RoboDK pour la simulation de robot et la programmation hors ligne.
Avec l’add-in RoboDK pour Rhino, vous pouvez facilement charger des modèles 3D créés dans Rhino vers RoboDK. Ce plug-in vous permet de programmer plus de 30 fabricants de robots différents et 300 robots directement à partir de Rhino.
Les programmes de robot peuvent être générés directement à partir d’un groupe de courbes, de points ou de programmes FAO (tels que les fichiers APT ou G-code). Les robots peuvent être facilement programmés comme des machines à 5 axes pour une grande variété d’applications de fabrication telles que le forage, le soudage, le rognage, l’impression 3D ou l’usinage robot. Plus d’informations disponibles dans la section Usinage robot.
La section de post-processeurs de robots montre une liste des marques de robots et des contrôleurs pris en charge. Il est également possible de modifier ou de créer de nouveaux post-processeurs pour personnaliser la génération du programme
Le plug-in RoboDK pour Rhino fonctionne pour Rhino 5 et Rhino 6. Le plug-in RoboDK Rhino est gratuit, cependant, certaines options de RoboDK nécessitent l’achat d’une licence.
Suivre ces étapes pour installer le plugin RoboDK pour Rhino :
Télécharger :
1.Télécharger et installer Rhinoceros.
2.Télécharger et installer RoboDK. Les fichiers d’installation de Rhino seront disponibles dans C:/RoboDK/Other/Plugin-Rhino/.
3.Télécharger le plugin RoboDK pour Rhino directement ou depuis Food4Rhino.
4.Dézipper les fichiers.
Double-cliquer sur le fichier d’installation de RoboDK.RUI et suivvre les instructions pour installer le plugin. Si cette procédure échoue, il est possible d’ installer le plugin manuellement.
Le plug-in RoboDK pour Rhino contient des commandes Rhino (commençant par le préfixe RoboDK_...), des composants Grasshopper et une barre d’outils. Chaque bouton de la barre d’outils est lié à une commande RoboDK.


La barre d’outils par défaut fournie pour Rhino comprend 5 boutons :
![]()
●![]() Auto Setup – Ce bouton vous permet de sélectionner n’importe quelle géométrie (courbes ou points) et ils seront chargés dans RoboDK avec le modèle 3D. Ce bouton correspond à la commande RoboDK_autosetup.
Auto Setup – Ce bouton vous permet de sélectionner n’importe quelle géométrie (courbes ou points) et ils seront chargés dans RoboDK avec le modèle 3D. Ce bouton correspond à la commande RoboDK_autosetup.
●![]() Load Part – Charger le modèle 3D de Rhino vers RoboDK. Les fonctionnalités telles que les courbes ou les points ne seront pas chargées. Ce bouton correspond à la commande RoboDK_part2robot.
Load Part – Charger le modèle 3D de Rhino vers RoboDK. Les fonctionnalités telles que les courbes ou les points ne seront pas chargées. Ce bouton correspond à la commande RoboDK_part2robot.
●![]() Load Curve(s) – Charger toutes les courbes sélectionnées dans RoboDK comme un nouvel élément. Toutes les surfaces sélectionnées seront utilisées pour calculer les courbes normales. Ces normales sont importantes car elles vont définir l’axe d’approche du robot. Ce bouton correspond à la commande RoboDK_curve2robot
Load Curve(s) – Charger toutes les courbes sélectionnées dans RoboDK comme un nouvel élément. Toutes les surfaces sélectionnées seront utilisées pour calculer les courbes normales. Ces normales sont importantes car elles vont définir l’axe d’approche du robot. Ce bouton correspond à la commande RoboDK_curve2robot
●![]() Load Point(s) – Charger tous les points sélectionnés dans RoboDK comme un nouvel objet. Toutes les surfaces sélectionnées seront utilisées pour calculer les points normaux. Ces normales sont importantes car elles vont définir l’axe d’approche du robot. Ce bouton correspond à la commande RoboDK_points2robot
Load Point(s) – Charger tous les points sélectionnés dans RoboDK comme un nouvel objet. Toutes les surfaces sélectionnées seront utilisées pour calculer les points normaux. Ces normales sont importantes car elles vont définir l’axe d’approche du robot. Ce bouton correspond à la commande RoboDK_points2robot
●![]() Settings – Ouvrir la fenêtre Paramètres par défaut. Il s’agit de la même fenêtre de paramètres qui s’affiche pour chaque composant de grasshopper. Ce bouton correspond à la commande RoboDK_setdefaults
Settings – Ouvrir la fenêtre Paramètres par défaut. Il s’agit de la même fenêtre de paramètres qui s’affiche pour chaque composant de grasshopper. Ce bouton correspond à la commande RoboDK_setdefaults
La principale différence entre Auto Setup et Load Curve(s) ou Load Point(s) est que Auto Setup charge la pièce et crée un nouveau projet de suivi de Courbes/Points. L’utilisation de Load Curve(s) ou Load Point(s) est plus rapide et ne fera que mettre à jour les caractéristiques géométriques existantes dans RoboDK, en conservant les paramètres définis précédemment.
Le plug-in RoboDK pour Rhino comprend 3 composants Grasshopper :

●![]() Curve to robot (Crv2Rob) – Charger une courbe (C) ou un groupe de courbes dans RoboDK. En option, une ou plusieurs surfaces (S) peuvent être fournies pour extraire les normales de surface pour chaque point de la courbe.
Curve to robot (Crv2Rob) – Charger une courbe (C) ou un groupe de courbes dans RoboDK. En option, une ou plusieurs surfaces (S) peuvent être fournies pour extraire les normales de surface pour chaque point de la courbe.
●![]() File to robot (File2Rob) – Charger un fichier (F) dans RoboDK. Le chemin de ce fichier doit être fourni. RoboDK prend en charge le chargement de fichiers APT ou G-code qui sont destinés à des fins de fabrication 5 axes, tels que l’impression 3D ou l’usinage robot. Lire la section Usinage robot pour plus d’informations.
File to robot (File2Rob) – Charger un fichier (F) dans RoboDK. Le chemin de ce fichier doit être fourni. RoboDK prend en charge le chargement de fichiers APT ou G-code qui sont destinés à des fins de fabrication 5 axes, tels que l’impression 3D ou l’usinage robot. Lire la section Usinage robot pour plus d’informations.
●![]() Points to robot (Pts2Rob) – Charger un point (P) ou un groupe de points dans RoboDK. En option, il est possible de définir les vecteurs normaux correspondants (ou vecteur d’approche) pour chaque point (N).
Points to robot (Pts2Rob) – Charger un point (P) ou un groupe de points dans RoboDK. En option, il est possible de définir les vecteurs normaux correspondants (ou vecteur d’approche) pour chaque point (N).
Tous les composants retournent un statut (S) en pourcentage (100% signifie que le robot peut terminer le programme avec succès). De plus, un message descriptif (M) peut être lu à partir de chaque composant.
Faire un clic droit sur n’importe quel composant et sélectionner Robot Setup Options (RoboDK) pour personnaliser les paramètres spécifiques à un composant.

Chaque composant de Grasshopper contient des paramètres spécifiques qui peuvent être personnalisés. Nous pouvons également modifier les paramètres par défaut qui s’appliquent aux commandes RoboDK (ou les boutons de la barre d’outils) en sélectionnant le bouton Paramètres.

●Object Name – Définir le nom de l’objet curve/points qui sera chargé dans RoboDK. L’objet dans RoboDK est remplacé chaque fois que le parcours est recalculé. Cette valeur est ignorée si le nom de l’objet est fourni comme entrée de composant (O).
●Project Name – Définir le nom/chemin du projet/station RoboDK (fichier.RDK) à utiliser. Si le fichier est déjà chargé, il utilisera le projet existant. Si le projet ouvert dans RoboDK ne correspond pas au nom du fichier, il s’ouvrira si le chemin complet est spécifié.
●Robot Name – Définir le nom de l’objet robot qui sera chargé dans RoboDK. Le nom du robot doit correspondre au nom visible dans l’arborescence de la station RoboDK. Laisser cette valeur vide (par défaut) pour utiliser le premier robot disponible.
●Reference Name – Définir le nom du repère de référence pour définir un parcours par rapport au robot. Le nom doit correspondre au nom visible dans l’arborescence de la station RoboDK.
●Tool Name – Définir le nom de l’outil (TCP) à utiliser avec le robot pour suivre un parcours donné.
Le nom doit correspondre au nom visible dans l’arborescence de la station RoboDK.
●Program Name – Définir le nom ou le parcours du programme à générer.
●Load Path as Points – Cocher cette option pour créer l’objet comme points et un projet de suivi de point dans RoboDK. Ceci est utile pour les opérations de fabrication telles que le forage. Décocher cette option pour charger le parcours comme un projet de suivi de courbe.
●Invert Normals – Cocher cette option pour inverser les normales de surface calculées. Cela fera basculer l’orientation de l’outil du robot.
●Use Rhino Theme in RoboDK – Démarrer RoboDK avec un thème Rhino. Cela inclut de changer le comportement de la souris pour la navigation 3D et la couleur d’arrière-plan. Ces paramètres ne s’appliquent que lorsque RoboDK est lancé avec Rhino. Ces paramètres peuvent être modifiés dans le menu Outils-Options de RoboDK.
●Communication Port – Définir le port de communication pour communiquer avec RoboDK. Plusieurs instances de RoboDK peuvent être exécutées en même temps et utiliser des configurations différentes si un port différent est utilisé. Lorsque cette valeur est définie à -1 (par défaut), le port par défaut est utilisé (20500).
●Startup Options –Définir les arguments pour passer à RoboDK la première fois qu’il démarre. Par exemple, pour lancer RoboDK en silence, il est possible de définir '/NOSPLASH /NOSHOW /HIDDEN'. Les programmes peuvent toujours être générés même si RoboDK n’est pas affiché. Plus d’informations dans la section Ligne de commande de l’API RoboDK.
●Linear Tolerance (mm) – Définir la précision linéaire pour diviser les courbes en un ensemble de points.
●Angle Tolerance (mm) – Définir la précision angulaire pour diviser les courbes en un ensemble de points.
Boutons :
●Open RoboDK – Ouvrir un projet dans RoboDK... Une nouvelle fenêtre s’ouvrira avec des options supplémentaires.
●Load Project … – Charger le projet RoboDK (fichier RDK) avec lequel vous voulez utiliser ce composant.
●Open Library – Ouvrir la bibliothèque en ligne de RoboDK.
●
●Set defaults – Définir les paramètres par défaut du composant.
●OK – Appliquer ces paramètres et fermer cette fenêtre. Ne pas sélectionner OK n’appliquera pas les paramètres que vous avez modifiés.
Cette section présente des exemples de base pour charger un projet Rhino dans RoboDK à des fins de simulation de robot et de programmation hors ligne.
Cet exemple montre comment charger un exemple de station RoboDK (configuration par défaut) et suivre un ensemble de courbes définies dans Rhino avec le robot.
1.Charger l’exemple de Dôme dans Rhino.
2.Sélectionner dans le ruban l’onglet RoboDK et sélectionner ![]() Settings.
Settings.
3.Sélectionner Load Project…
4.Sélectionner Default Setup. RoboDK démarrera et chargera un projet d’essai avec un robot KUKA, un outil (une broche comme outil 1) et un repère (référence 1)

5.Fermer la fenêtre de paramètres ou sélectionner OK.
6.Sélectionner le bouton ![]() Auto Setup dans Rhino.
Auto Setup dans Rhino.
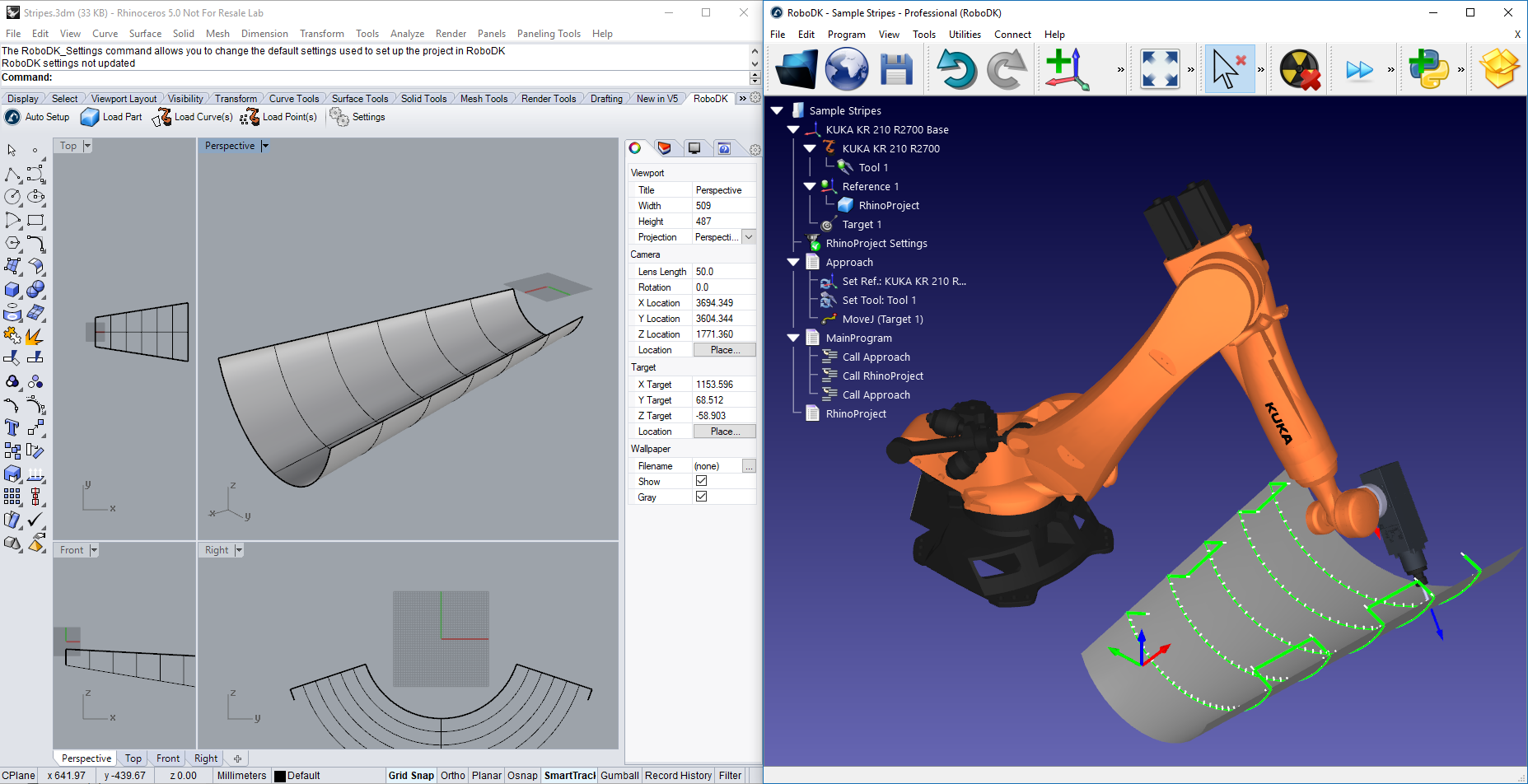
7.Sélectionner toutes les courbes et surfaces et appuyer sur Entrer (ou faire un clic droit). Le projet sera chargé dans RoboDK comme indiqué dans l’image suivante.
Vous voyez la partie chargée sur le repère actif (Référence 1) et un nouveau projet de suivi de Courbe dans RoboDK qui suit les courbes avec l’outil du robot actif (Outil 1).

Nous pouvons également voir que les normales de surface ont été extraites dans la direction opposée. Suivez ces étapes pour résoudre ce problème
8.Sélectionner ![]() Settings.
Settings.
9.Cocher l’option Invert Normals.
10.Sélectionner OK.
11.Répéter les étapes 6 et 7.
Vous voyez maintenant les normales de surface basculer et le mouvement d’approche venir du haut de la pièce. Le robot devrait être en mesure de se déplacer le long du parcours outils sans aucun problème
Double-cliquer sur ![]() RhinoProject Settings depuis l’arborescence de RoboDK pour ouvrir plus d’options et modifier le parcours outil réalisé par le robot.
RhinoProject Settings depuis l’arborescence de RoboDK pour ouvrir plus d’options et modifier le parcours outil réalisé par le robot.
Par exemple, sélectionner Show preferred tool path pour voir et modifier l’orientation par défaut de l’outil par rapport à la pièce. Modifier la valeur de décalage du parcours outil (Path to tool offset) pour définir une rotation supplémentaire. Il est possible d’entrer une nouvelle valeur ou tout simplement utiliser la molette de la souris pour voir un aperçu rapide du résultat.
Plus d’informations disponible pour modifier ces paramètres dans la section usinage robot.

Enfin, lorsque la simulation produit le résultat souhaité, vous pouvez générer le programme ou exporter la simulation :
12.Faire un clic droit sur le programme RhinoProject
13.Sélectionner Généré programme robot (F6). Le programme robot sera généré et affiché.

Astuce : Faire un clic droit sur un programme et sélectionner Show Instructions pour voir les instructions générées et déboguer le programme. De nouvelles instructions peuvent être ajoutées manuellement en sélectionnant Add Instruction.
Cet exemple montre comment utiliser le plug-in RoboDK pour Grasshopper en divisant une surface comme une grille de points et en les suivants avec un robot pour une opération de forage avec RoboDK :
1.Charger l’exemple de Grasshopper fourni avec le plug-in RoboDK (fichier 3dm et gh).

2.Faire un clic droit sur le composant Pts2rob et sélectionner Robot Setup Options (RoboDK). Sélectionner Load Project… et sélectionner Default Setup pour charger un exemple de station RoboDK (même exemple de projet montré dans la section précédente).

Nous pouvons optionnellement définir le nom de l’objet comme une entrée de composant (O). Nous pouvons également spécifier un projet dans les options du composant pour que le projet RoboDK souhaité soit utilisé avec chaque composant.
3.Dans Grasshopper, sélectionner Solution ➔ Recompute (F5) pour mettre à jour la pièce et le programme dans RoboDK

Il est recommandé d’essayer l’installateur automatique RUI. Si ce programme d’installation échoue, il est possible d’installer manuellement le plug-in RoboDK pour Rhino en suivant ces étapes :
Téléchargements :
1.Télécharger et installer Rhinoceros.
2.Télécharger et installer RoboDK.
3.Télécharger le plugin RoboDK pour Rhino directement ou depuis Food4Rhino.
4.Dézippé le fichier.
Débloqué les propriétés :
5.Faire un clic droit sur le fichier RhinoRoboDKcmd.rhp et sélectionner Propriétés.
6.Sélectionner Débloquer et Appliquer.
7.Répéter les étapes 5 et 6 pour RhinoRoboDKgh.gha.

Charger le plugin RoboDK dans Rhino :
8.Charger le plugin RoboDK pour Rhino : Ouvrir le fichier RhinoRoboDKcmd.rhp avec Rhino.
9.Charger la barre d’outils RoboDK par défaut pour Rhino : Ouvrir le fichier RhinoToolbar-Add-RoboDK.rui avec Rhino.
10.Charger les composants Grasshopper de RoboDK : Ouvrir le fichier RhinoRoboDKgh.gha avec Grasshopper (ouvrir Grasshopper en tapant la commande grasshopper).
Redémarrer Rhino :
11.Fermer Rhino et réouvrir le pour voir le plugin Grasshopper.