ตำแหน่งหน่วยประมวลผล
ตำแหน่งหน่วยประมวลผลเป็นขั้นตอนการเขียนโปรแกรมออฟไลน์เพราะอนุญาตความยึดหยุ่นในการสนับสนุนหุ่นยนต์ควบคุม ตำแหน่งหน่วยประมวลผลหุ่นยนต์ถูกนิยามว่าโปรแกรมหุ่นยนต์จะต้องถูกสร้างขึ้นเพื่อหุ่นยนต์ควบคุมเฉพาะ
การแปลงจากการจำลอง RoboDK เพื่อโปรแกรมหุ่นยนต์เฉพาะถูกทำให้เสร็จโดยหน่วยประมวลผล หุ่นยนต์แต่ละตัวมีหน่วยประมวลผลซึ่งออกแบบมาตั้งแต่เริ่มต้น หน่วยประมวลผลถูกใช้เมื่อโปรแกรมถูกสร้างขึ้นออฟไลน์ในส่วน Generate Program(โดยการกดที่โปรแกรม,จากนั้น,การเลือกสร้างโปรแกรมหุ่นยนต์)
RoboDK มาจากหน่วยประมวลผลซึ่งสนับสนุนจากหุ่นยนต์ควบคุมหลายตัว, รายชื่อในส่วน Available Post Processors อีกทางเลือกหนึ่ง,มีความเป็นไปได้ที่จะสร้างหน่วยประมวลผลแบบกำหนดเองหรือดัดแปลงหน่วยประมวลผลที่มี หน่วยประมวลผลที่ใช้ได้ทั้งหมดอยู่ในโฟลเดอร์:
C:/RoboDK/Posts/
หน่วยประมวลผลหนึ่งคือไฟล์PY (แต่ละหน่วยประมวลผลถูกกำหนดด้วยต้นฉบับ Python) นอกจากนี้ยังสามารถเพิ่ม, ดัดแปลงหรือลบไฟล์ในโฟลเดอร์PostsของRoboDK ถ้าคุณได้จัดหาหน่วยประมวลผลของ RoboDK เรียบร้อยแล้ว (ไฟล์ PY) มันควรจะถูกวางในตำแหน่งโฟลเดอร์ซึ่งมันสามารถถูกเลือกจาก RoboDK
ในส่วนนี้แสดงการเลือก, แก้ไขและสร้างหน่วยประมวลผลและใช้มันกับหุ่นยนต์ของคุณใน RoboDKการเริ่มต้นที่รวดเร็วสามารถใช้ได้ในวิดีโอต่อไปนี้:
https://www.robodk.com/help#PostProcessor
การเลือกหน่วยประมวลผลสำหรับหุ่นยนต์:
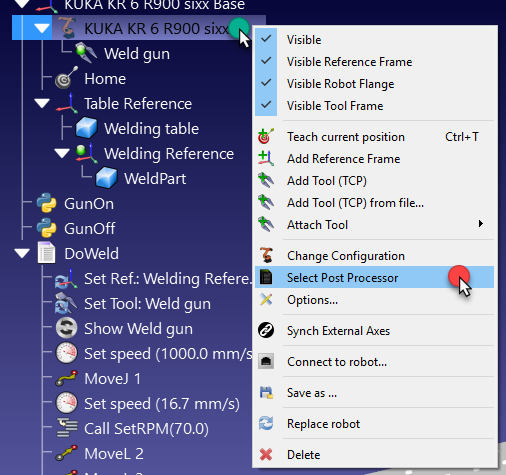
1.คลิกขวาที่หุ่นยนต์หรือโปรแกรม
2.เลือกSelect Post Processor
3.เลือกหน่วยประมวลผลจากรายการ
4.เลือก OK

การเปลี่ยนแปลงได้ถูกใช้และโปรแกรมสามารถถูกสร้างอีกครั้งเพื่อเห็นผลลัพธ์
โดยมีทางเลือก, สามารถเลือกหน่วยประมวลผลจากขั้นตอนต่อไปนี้
1.เปิดแผงหน้าปัดหุ่นยนต์ (ดับเบิ้ลคลิกที่หุ่นยนต์)
2.เลือกParameters
3.เลือกหน่วยประมวลผลในกล่องยี่ห้อหุ่นยนต์ตามที่แสดงในรูปดังต่อไปนี้

อีกทั้งยังสามารถดัดแปลงหน่วยประมวลผลหรือสร้างหน่วยประมวลผลขึ้นมาใหม่ หน่วยประมวลผลจะต้องถูกวางในโฟลเดอร์ C:/RoboDK/Posts/ ซึ่งสามารถถูกเลือกได้ใน RoboDK ในส่วนก่อนหน้านี้อธิบายการเชื่อมโยงหุ่นยนต์เฉพาะกับหน่วยประมวลผล
แต่ละหน่วยประมวลผลเป็นไฟล์ PY และสามารถเปลี่ยนชื่อไฟล์และคัดลอกไฟล์จาก/ถึงโฟลเดอร์ C:/RoboDK/Posts/ เพื่อแบ่งปันหน่วยประมวลผลที่แตกต่างกัน เพื่อลบต้นฉบับหน่วยประมวลผลที่มีอยู่, ลบอย่างง่ายด้วยไฟล์ที่เหมือน PY ในตำแหน่งของโฟลเดอร์
หน่วยประมวลผลสามารถแก้ไขโดยใช้ตัวแก้ไขตัวอักษรหรือตัวแก้ไข Python(Python IDLE) การใช้ตัวแก้ไขPython อนุญาตให้แก้ปัญหาตัวอย่างโปรแกรมในตอนสุดท้ายของไฟล์
Python ควรจะถูกติดตั้งเพื่อทดสอบและใช้หน่วยประมวลผลอย่างเหมาะสม (Python ถูกติดติดตั้งเริ่มต้นด้วย RoboDK)
เพื่อดัดแปลงหน่วยประมวลผลที่มีอยู่:
1.เลือก Program➔Add/Edit Post Processor
2.เลือกหน่วยประมวลผลที่มีอยู่
3.เลือกOKตัวแก้ไขอักษรและโปรแกรมจะเปิดขึ้น
4.เลือกRun➔Run module (F5)เพื่อดูผลลัพธ์ ทำการเปลี่ยนแปลงถ้าจำเป็น

อีกทางเลือกหนึ่ง, ยังสามารถแก้ไขหน่วยประมวลผลได้ด้วยตนเอง:
1.ไปที่โฟลเดอร์หน่วยประมวลผล: C:/RoboDK/Posts/
2.เปิดไฟล์PY file ด้วย Python IDLE (คลิกขวา➔แก้ไขด้วย IDLE) หรือตัวแก้ไขอักษรอื่น
3.ทำการเปลี่ยนแปลงที่ต้องการ
4.ดำเนินการเพื่อทดสอบผลลัพธ์: เลือกRun➔Run module (F5 โดยเริ่มต้น) จาก Python IDLE
อีกทางเลือกหนึ่ง, ยังสามารถแก้ไขไฟล์ที่ใช้ตัวแก้ไขอักษรเพื่อดำเนินการ Python โดยการดับเบิ้ลคลิก

ในส่วนนี้จะแสดงวิธีการเปลี่ยนแปลงเล็กๆในหน่วยประมวลผล
ดังตัวอย่าง, การเปลี่ยนแปลง3อย่างจะถูกทำในหน่วยประมวลผล KUKA KRC4
●แทนที่ความเร็วสูงสุดถึง 500 mm/s. ถ้าแม้ว่าถ้าหุ่นยนต์ถูกเขียนให้เร็วกว่านี้, ความเร็วจะยังคงถูกจำกัด 500 mm/sในหน่วยประมวลผล
●สร้างแต่ละโปรแกรมโดยแยกไฟล์ออกจากกันและบังคับโปรแกรมให้มี 3000 เส้นของโค้ดแต่ละโปรแกรมเป็นส่วนใหญ่ โปรแกรมใหญ่จะถูกแบ่งให้เล็กลงและจะถูกเรียกตามลำดับ
ในส่วนก่อนหน้านี้แสดงวิธีการเปิดหน่วยประมวลผลที่แก้ไขอยู่:
1.เลือกโปรแกรม➔เพิ่ม/แก้ไขหน่วยประมวลผล
2.เลือก KUKA_KRC4
3.เลือก OK. หน่วยประมวลผลจะถูกแสดงในตัวแก้ไข Python IDLE
ตามส่วนดังต่อไปนี้แสดงว่าการเปลี่ยนแปลงจากคำแนะนำบนตัวแก้ไขอักษร
ตามขั้นตอนเหล่านี้เพื่อตั้งค่าความเร็วอยู่ที่ 500 mm/s และหลีกเลี่ยงการตั้งค่าความเร็วที่สูงกว่านี้โดยใช้ RoboDK:
1.ตั้งคำจำกัดความฟังก์ชั่นsetSpeed (def setSpeed)
2.เพิ่มเส้นดังต่อไปนี้เพื่อสร้าง $VEL.CP ผลลัพธ์ซึ่งจะเปลี่ยนความเร็วเป็นm/s:
speed_mms = min(speed_mms, 500)

เพิ่มการเปลี่ยนแปลงดังต่อไปนี้เพื่อหลีกเลี่ยงการเพิ่มมากกว่าหนึ่งโปรแกรมต่อหนึ่งไฟล์และสร้างโปรแกรมด้วย 3000 เส้นของโค้ดส่วนใหญ่:
1.ตั้งค่าตัวแปรเป็น MAX_LINES_X_PROG ถึง 3000
2.ตั้งค่าตัวแปรเป็น INCLUDE_SUB_PROGRAMS ถึง False

โดยเริ่มต้น, หน่วยประมวลผลต่อไปนี้สามารถใช้ได้ใน RoboDK:
●ABB_RAPID_IRC5: สำหรับหุ่นยนต์ควบคุม ABB IRC5
●ABB_RAPID_S4C: สำหรับหุ่นยนต์ควบคุม ABB S4C
●Adept_Vplus: สำหรับ Adept V+ ภาษาการเขียนโปรแกรม
●Allen_Bradley_Logix5000: สำหรับ Allen Bradley Logix5000 PCL
●Comau_C5G: สำหรับหุ่นยนต์ควบคุมComau C5G
●Denso_RC8: สำหรับหุ่นยนต์ควบคุม Denso RC8
●Dobot: สำหรับหุ่นยนต์การศึกษา Dobot
●Fanuc_R30iA: สำหรับหุ่นยนต์ควบคุม Fanuc R30iA และ R30iB
●Fanuc_R30iA_Arc: สำหรับFanuc Arc welding
●Fanuc_RJ3: สำหรับหุ่นยนต์ควบคุม Fanuc RJ3
●GCode_BnR: สำหรับหุ่นยนต์ควบคุม B&R
●GSK: สำหรับหุ่นยนต์ GSK
●HIWIN_HRSS: สำหรับหุ่นยนต์ HIWIN
●KAIRO: สำหรับหุ่นยนต์ควบคุม Keba Kairo
●KUKA_IIWA: สำหรับ KUKA IIWA sunrise programming in Java
●KUKA_KRC2: สำหรับหุ่นยนต์ควบคุม KUKA KRC2
●KUKA_KRC2_CamRob: สำหรับ KUKA CamRob milling option
●KUKA_KRC2_DAT: สำหรับหุ่นยนต์ควบคุม KUKA KRC2 รวมทั้งข้อมูลไฟล์ DAT
●KUKA_KRC4: สำหรับหุ่นยนต์ควบคุม KUKA KRC4
●KUKA_KRC4_Config: สำหรับหุ่นยนต์ควบคุมKUKA KRC4 ด้วยการกำหนดค่าข้อมูลในแต่ละเส้น
●KUKA_KRC4_DAT: สำหรับหุ่นยนต์ควบคุม KUKA KRC4 รวมทั้งข้อมูลไฟล์ DAT
●Kawasaki: Kawasaki AS
●Mecademic: สำหรับหุ่นยนต์ Mecademic Meca500
●Mitsubishi: สำหรับหุ่นยนต์ควบคุม Mitsubishi
●Nachi_AX_FD: สำหรับหุ่นยนต์ควบคุม Nachi AX and FD
●OTC: สำหรับหุ่นยนต์ควบคุม Daihen OTC ช
●Precise: สำหรับหุ่นยนต์ Precise Scara
●Siemens_Sinumerik: สำหรับ Siemens Sinumerik ROBX
●Staubli_VAL3: สำหรับหุ่นยนต์ Staubli VAL3 robot programs (CS8 controllers and later)
●Staubli_VAL3_InlineMove: to generate Staubli VAL3 programs with inline movement data
●Staubli_S6: สำหรับหุ่นยนต์ควบคุม Staubli S6
●Toshiba: สำหรับหุ่นยนต์ Toshiba
●Universal_Robots: สำหรับหุ่นยนต์ UR robots, สร้างการเคลื่อนที่เส้นตรงเหมือนกับเป้าหมายลวง
●Universal_Robots_RobotiQ: สำหรับหุ่นยนต์ UR รวมถึงสนับสนุนสำหรับตัวจับ RobotiQ
●Universal_Robots_joints: สำหรับหุ่นยนต์ UR robots,สร้างการเคลื่อนที่เส้นตรงซึ่งเป้าหมายร่วมกัน
●Yamaha: สำหรับหุ่นยนต์ Yamaha
วิดีโอต่อไปนี้แสดงถึงภาพรวมของหน่วยประมวลผลใน RoboDK:
https://www.robodk.com/help#PostProcessor
เอกสารอ้างอิงสำหรับแต่ละวิธีในหน่วยประมวลผลสามารถดูออนไลน์ได้:
http://www.robodk.com/doc/PythonAPI/postprocessor.html
หน่วยประมวลผลทั้งหมดที่ใช้โมดูล robodk.py :
https://robodk.com/doc/PythonAPI/robodk.html#robodk.Mat
โมดูล robodk.pyจัดหาเครื่องมือสำหรับลักษณะการปฏิบัติการ (การเพิ่มจำนวน, การผกผัน, …) และการแปลงระหว่างลักษณะของมุมออยเลอร์ในรูปแบบที่แตกต่างกัน,ท่ามกลางหลายอย่าง
หนังสืออ้างอิงสามารถดูออนไลน์เพื่อเรียนรู้เกี่ยวกับการเขียนโปรแกรม Python
https://docs.python.org/3/
เมื่อโปรแกรมได้ถูกสร้างขึ้นแล้ว, กระบวนการก่อนหน้า/เป็นสากล ของโปรแกรม Python ถูกสร้างขึ้นและบันทึกถาวรในพื้นที่โฟลเดอร์ โปรแกรมกระบวนการก่อนหน้าถูกเชื่อมต่อกกับหน่วยประมวลผลที่ถูกต้อง (ถูกเลือกจากผู้ใช้ใน RoboDK) หน่วยประมวลผลกำหนดระดับตำแหน่งหุ่นยนต์ซึ่งสร้างขึ้นตามโค้ดที่อยากเขียน
โปรแกรมก่อนการรวบรวมและดำเนินการกับPython