RoboDK API
The RoboDK API (อินเตอร์เฟซโปรแกรมแอพพลิเคชั่น) เป็นกลุ่มของงานหลักและคำสั่งซึ่ง RoboDK เปิดเผยผ่านภาษาการเขียนโปรแกรมซึ่งอนุญาตให้การเขียนโปรแกรมหุ่นยนต์ใดๆสามารถใช้ภาษาการเขียนโปรแกรมที่มีเอกลักษณ์ของตนเอง
เปรียบเทียบกับผู้จัดจำหน่ายการเขียนโปรแกรมหุ่นยนต์โดยเฉพาะ เนื่องด้วยRoboDK API ยังสามารถจำลองและสั่งการหุ่นยนต์ใดๆด้วย เอกลักษณ์/สากล ภาษาการเขียนโปรแกรมเช่น Python หน้าหลักซึ่งมีภาพรวมและวีดีโอและการแสดงวีดีโอoffline programming with the API.
The RoboDK API สามารถใช้ได้กับ Python, C# andMatlab ภาษาการเขียนโปรแกรมเหล่านี้สามารถถูกใช้จำลองและวางวิธีการให้หุ่นยนต์
The RoboDK API สามารถถูกใช้โดยงานดังต่อไปนี้:
1.ทำให้การจำลองอัตโนมัติ สร้าง macros อัตโนมัติสำหรับงานเฉพาะภายในแบบจำลอง RoboDK ดังตัวอย่าง การเคลื่อนย้ายสิ่ง,หน้าต่างอ้างอิงหรือหุ่นยนต์
2.การเขียนโปรแกรมออฟไลน์: การเขียนโปรแกรมหุ่นยนต์ออฟไลน์จากภาษาการเขียนโปรแกรมสากล RoboDK จะสร้างโปรแกรมเฉพาะสำหรับหุ่นยนต์ควบคุมเฉพาะเมื่อ API ถูกใช้งาน(เช่น program ใน Python หรือ C#). โปรแกรมหุ่นยนต์ถูกสร้างขึ้นตาม post processor ที่เลือกเฉพาะสำหรับหุ่นยนต์ ส่วนOffline Programming with Pythonของเอกสารที่จัดหามากกว่าข้อมูลหรือตัวอย่าง
3.การเขียนโปรแกรมออนไลน์: การเขียนโปรแกรมหุ่นยนต์ออนไลน์ใช้งานสำหรับภาษาการเขียนโปรแกรมทั่วโลก: อีกทั้งยังสามารถย้ายหุ่นยนต์และย้ายกลับคืนมาตำแหน่งล่าสุดจาก RoboDK API RoboDK จะทำขับเคลื่อนหุ่นยนต์โดยใช้robot drivers ส่วน Online Programming with Python ในเอกสารนี้จัดหามากกว่าข้อมูลและตัวอย่าง
ในอีกความหมายหนึ่ง, โปรแกรมที่เหมือนกันซึ่งใช้สำหรับการจำลอง (1) สามารถถูกใช้สร้างโปรแกรมหุ่นยนต์ (2, การเขียนโปรแกรมออฟไลน์) และเคลื่อนย้ายหุ่นยนต์ในเวลาจริง (3, การเขียนโปรแกรมออนไลน์)
เอกสารนี้ครอบคุลมด้วยหัวข้อดังต่อไปนี้:
●Python API ด้วยตัวอย่างของการจำลอง, การเขียนโปรแกรมออฟไลน์และโปรแกรมออนไลน์
●C# API ด้วยตัวอย่างของการจำลอง, การเขียนโปรแกรมออฟไลน์และโปรแกรมออนไลน์
●Matlab API ด้วยตัวอย่างของ Simulink สำหรับการจำลอง
●ตัวเลือก Command line เพื่อเริมต้น RoboDK
Pythonเป็นภาษาเขียนโปรแกรมขั้นสูงที่ใช้กันอย่างกว้างขวางสำหรับจุดประสงค์เพื่อการเขียนPython เป็นภาษาการเขียนโปรแกรมซึ่งให้คุณทำงานได้เร็วขึ้นและดำเนินการระบบของคุณให้มีประสิทธิภาพยิ่งขึ้น Python's syntax อนุญาตให้คนเขียนโปรแกรมต่อยอดแนวความคิดเส้นบางอันของโค้ดซึ่งถูกเปรียบเทียบกับภาษาอื่น, ทำให้เป็นมิตรและง่ายต่อการเรียนรู้
previous sectionอธิบายถึงข้อได้เปรียบของการใช้ RoboDK API ซึ่งเป็นภาษาโปรแกรมที่ใช้งานกว้างขวางสำหรับการเขียนโปรแกรมเช่น Python
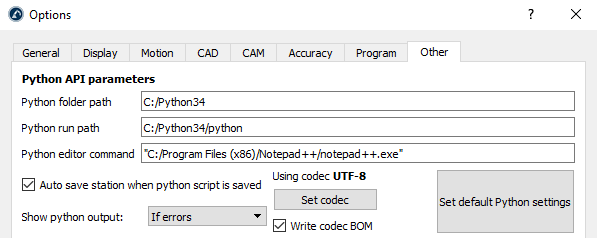
Python ถูกติดตั้งอย่างอัตโนมัติและดำเนินการด้วย RoboDK โดยเริ่มต้น Select Tools➔Options➔Otherเพื่อเปลี่ยนเป็นการตั้งค่าเริ่มต้น (ตำแหน่งPython และตัวแก้ไขPython)
The RoboDK API สำหรับ Python ถูกแบ่งตามสองโมดูลต่อไปนี้:
●โมดูลrobolink (robolink.py): โมดูล robolinkคือการเชื่อมต่อระหว่าง RoboDK และ Python. สิ่งของใดๆในฐานต้นไม้RoboDK สามารถเอาคืนกลับมาโดยใช้สิ่งของRobolinkและถูกแสดงเป็นสิ่งของไอเทมอีกทั้งยังสามารถแสดงระบบปฏิบัติการที่แตกต่างกันได้บนไอเทมซึ่ง Robolink.Item
●โมดูล robodk (robodk.py): โมดูล robodkเป็นแถบเครื่องมือหุ่นยนต์สำหรับ Python ซึ่งอนุญาตให้ทำงานกับลักษณะการเปลี่ยนแปลงและได้รับมุมออยเลอร์สำหรับผู้ขายหุ่นยนต์แต่ละชนิด โดยลักษณะของหน่วยประมวลผลขึ้นอยู่กับโมดูล robodk
โมดูล Python ถูกตั้งในโฟลเดอร์ C:/RoboDK/Python/ และถูกคัดลอกไปยังทางโฟลเดอร์ Python อย่างอัตโนมัติเมื่อ RoboDK ถูกติดตั้งหรือเมื่อตั้งค่าSet default Python settingsถูกเลือก (ดูได้จากรูปก่อนหน้า)
ตามหัวข้อย่อยที่แสดงวิธีการสร้างโปรแกรมทั่วไปสำหรับการลอง, การเขียนโปรแกรมออฟไลน์และการเขียนโปรแกรมออนไลน์ตามลำดับ ตัวอย่างมากกว่านี้สามารถดูได้จากหน้าPython API for RoboDKอีกทั้งคลัง RoboDK มาจากตัวอย่าง Python macros ในโฟลเดอร์ C:/RoboDK/Library/Macros/
ตามขั้นตอนเหล่านี้เพื่อตั้งค่าโครงการตัวอย่างเพื่อใช้ UR และจำลองการเคลื่อนที่ของหุ่นยนต์
1.เลือกFile➔![]() Open
Open
2.เปิดหุ่นยนต์UR10
3.เลือกFile➔![]() Open
Open
4.เปิดไฟล์Paint_gun.tool
5.เปิดตัวอย่างโปรแกรม Python SampleOfflineProgramming.pyจาก C:/RoboDK/Library/Macros/
6.ดับเบิ้ลคลิกไอเทมSampleOfflineProgrammingเพื่อดำเนินการจำลอง หุ่นยนต์ควรจะวาดหกเหลี่ยมรอบพื้นที่ล่าสุดของหุ่นยนต์และการติดตามTCP จะถูกแสดงผลในสีเหลือง
อีกทางเลือกหนึ่ง, คลิกขวาที่โปรแกรมและเลือก![]() Run Python Script.
Run Python Script.
7.คลิกขวาที่ไอเทม![]() SampleOfflineProgrammingและเลือกEdit Python Scriptพวกเราควรเห็นโปรแกรมตามที่ถูกแสดงในรูปถัดไป
SampleOfflineProgrammingและเลือกEdit Python Scriptพวกเราควรเห็นโปรแกรมตามที่ถูกแสดงในรูปถัดไป
SampleOfflineProgramming macro จะวาดรูปหลายเหลี่ยมของด้านn_sidesและรัศมีRจุดพื้นที่ล่าสุดของหุ่นยนต์, ซึ่งเกี่ยวข้องกับหน้าต่างอ้างอิงหุ่นยนต์, ถ้าต้องการ, ย้ายหุ่นยนต์ไปในที่ต่างกันโดยการเปลี่ยนมิติของรูปหลายเหลี่ยมและดำเนินการโปรแกรมใหม่
ตัวอย่างนี้คล้ายกับโปแกรมที่ถูกแสดงผลในส่วน offline programming ในเว็บไซต์ (รวมถึงวีดีโอ)

โปรแกรม Python สามารถถูกสร้างออฟไลน์เพื่อใช้โค้ด Python เดียวกันเพื่อถูกใช้จำลองหุ่นยนต์ (ตามที่แสดงในส่วนก่อนหน้าPython Simulation) การเขียนโปรแกรมออฟไลน์อนุญาตการสร้างโปรแกรมหุ่นยนต์ซึ่งสามารถถูกดำเนินการบนหุ่นยนต์ควบคุมเฉพาะ:
1.คลิกขวาที่โปรแกรม![]()
2.เลือกGenerate robot program (F6)
ในกรณีนี้โปรแกรมไม่ได้ถูกจำลองแต่ดำเนินการอย่างรวดเร็วเพื่อจะได้ผลลัพธ์: โปรแกรมหุ่นยนต์เฉพาะเพื่อหุ่นยนต์ควบคุม

RDK = Robolink()
RDK.setRunMode(RUNMODE_MAKE_ROBOTPROG)
โปรแกรม Python สามารถถูกดำเนินการโดยตรงบนหุ่นยนต์โดยการใช้โค้ดPython ที่เหมือนกันเพื่อใช้จำลองหุ่นยนต์(ตามที่แสดงในส่วนของPython Simulation ). การเขียนโปรแกรมออนไลน์อนุญาตให้ดำเนินการบนโปรแกรมทั่วไปบนหุ่นยนต์ควบคุมเฉพาะที่ใช้ไดร์เวอร์หุ่นยนต์:
1.คลิกขวาที่โปรแกรม![]() Python
Python
2.เลือกRun on robot
โปรแกรมจะดำเนินการบนโปรแกรมโดยโปรแกรม program ถูกใช้งาน

RDK = Robolink()
RDK.setRunMode(RUNMODE_RUN_ROBOT)
C# (pronounced "C sharp") เป็นภาษาการเขียนโปรแกรมที่ถูกพัฒนาโดยไมโครซอฟและถูกออกแบบสำหรับการสร้างความหลากหลายของแอพพลิเคชั่นซึ่งดำเนินการบน .NET Framework C# เป็นสิ่งที่ง่าย, ทรงพลัง, รูปแบบปลอดภัยและเชิงวัตถุ
main section ของเอกสารแสดงความได้เปรียบของการใช้ RoboDK API กับภาษาการเขียนโปรแกรมเชิงกว้างเช่น C# สำหรับการเขียนโปรแกรมหุ่นยนต์
RoboDK API สำหรับ C# เป็นแหล่งไฟล์RoboDK.cs ซึ่งประกอบไปด้วยประเภทRoboDK (คล้ายกับประเภท Python’s Robolink ), ไอเทมประเภท RoboDK.Item (คล้ายกับประเภท Python’s Robolink.Item API), และอุปกรณ์อื่นสำหรับหุ่นยนต์เช่นประเภทเมทริกซ์ (RoboDK.Mat) สำหรับระบบปฏิบัติการเมทริกซ์เพื่อดำเนินการแปลง
RoboDK API สำหรับ C# ถูกจัดหาด้วยโครงการตัวอย่างที่แสดงในรูปดังต่อไปนี้ (แหล่งโค้ดที่เสร็จสมบูรณ์ถูกรวมอยู่ด้วย)

เลือก Load Fileเพื่อเปิดฐาน RoboDK หรือไฟล์บางอย่างที่ถูกสนับสนุนโดย RoboDK. ถ้าหุ่นยนต์ถูกโหลด, ตัวแปรหุ่นยนต์จะถูกอัพเดท (เหมือนกับการใช้Select Robot).
วีดีโอต่อไปนี้แสดงภาพรวมของโครงการ C# ซึ่งใช้ RoboDK API:
https://www.youtube.com/watch?v=1hRRYr9bEsY
โปรแกรม C# ถูกจำลองโดยการใช้ค่าเริ่มต้นเมื่อคำสั่งหุ่นยนต์ถูกใช้ (ดังตัวอย่าง MoveJ, MoveL หรือ setDO) เมื่อตัวอย่าง C# project ถูกเริ่มต้น, โหมดการจำลองถูกเลือกโดยค่าเริ่มต้น

นั้นหมายความว่าการเคลื่อนที่หุ่นยนต์จะถูกจำลองใน RoboDK. ดังตัวอย่าง, พวกเราสามารถย้ายหุ่นยนต์เป็นขั้นตอนของ 10 mm เลือกปุ่มบนขวา (+Tx, -Tx, …), หรือเราสามารถเลือกดำเนินการทดสอบโปรแกรมเพื่อดำเนินการเคลื่อนที่หกเหลี่ยมรอบพื้นที่ล่าสุดของหุ่นยนต์
ตั้งค่าคำสั่งพักเพื่อแก้ปัญหาแอพพลิเคชั่นของคุณและตรวจสอบเป้าหมายหุ่นยนต์ เป้าหมายหุ่นยนต์สามารถกำหนดได้จากพิกัดร่วมกันหรือตัวแปร Mat (ลักษณะเมทริกซ์4x4) และสามารถถูกตรวจสอบจากรูปแบบ XYZWPR เพื่อแก้ไขปัญหาโปรแกรม ข้อมูลเพิ่มเติมเกี่ยวกับหน้าต่างอ้างอิงในส่วนReference Frames

อีกทั้งยังสามารถเปลี่ยนโหมดดำเนินการOffline ProgrammingหรือOnline Programming (ดำเนินการหุ่นยนต์), ตามที่แสดงในส่วนถัดไป
โปรแกรม C# สามารถถูกสร้างออฟไลน์เพื่อใช้โค้ดC# เหมือนกันเพื่อจำลองหุ่นยนต์(โปรแกรมออฟไลน์) ตามขั้นตอนต่อไปนี้เพื่อทดสอบแบบรูปแบบนี้:
1.เลือกOffline Programmingในส่วนโหมดการดำเนินการ
2.เลือกRun Test Programหรือการรวมกันของการเคลื่อนที่●
3.เลือก Generate Progเพื่อที่จะได้รับโปรแกรมผู้ขายหุ่นยนต์เฉพาะ
ในกรณีนี้โปรแกรมไม่ได้ถูกจำลองแต่ถูกดำเนินการอย่างรวดเร็วเพื่อที่จะได้ผลลัพธ์: โปรแกรมหุ่นยนต์เฉพาะหุ่นยนต์ควบคุม โหมดดำเนินการจะถูกเปลี่ยนกลับไปเป็นการจำลองเมื่อโปแกรมได้ถูกสร้างขึ้น

โปรแกรม C# สามารถถูกดำเนินการโดยตรงบนหุ่นยนต์ที่ใช้โค้ด C# เหมือนกันในการจำลอง การเขียนโปรแกรมออนไลน์อนุญาตให้ดำเนินการบนโปรแกรมทั่วไปบนหุ่นยนต์ควบคุมเฉพาะซึ่งใช้ไดร์เวอร์หุ่นยนต์ ตามขั้นตอนเหล่านี้เพื่อทดสอบรูปแบบตัวอย่างโครงการ C#:
1.เลือกRun on Robotในส่วนโหมดการดำเนินการ
2.เลือกคำสั่งอื่นซึ่งทำให้หุ่นยนต์เคลื่อนไหว
การเคลื่อนไหวจะดำเนินการบนหุ่นยนต์จริงและแบบจำลองจะเกิดขึ้นในเวลาเดียวกันกับหุ่นยนต์

RDK = Robolink();
RDK.setRunMode(RUNMODE_RUN_ROBOT);
Matlab เป็นเจ้าของภาษาการเขียนโปรแกรมซึ่งถูกพัฒนาโดย MathWorks ในอีกหลายสิ่ง, MATLAB อนุญาตให้การจัดการเมทริกซ์, การเขียนเค้าโครงร่างของฟังก์ชั่นและข้อมูลและการใช้อัลกอริทึม
main section ของเอกสารนี้อธิบายข้อได้เปรียบของการใช้ RoboDK API ซึ่งถูกใช้เขียนภาษาโปรแกรมอย่างกว้างขวางเช่น Matlab สำหรับการเขียนโปรแกรมหุ่นยนต์
RoboDK API สำหรับ Matlab ใช้งานได้หลังจากRoboDK ถูกติดตั้งใน C:/RoboDK/Matlab/. API ถูกจัดด้วยกลุ่มของไฟล์ m , รวมถึง:
●Robolink.m เป็นประเภทของการเชื่อมต่อกับ RoboDK. สิ่งของใดๆในฐานต้นไม้ RoboDK สามารถถูกนำกลับมาใช้สิ่งของ Robolink และเป็นตัวแทนโดยสิ่งของRobolinkItem (คล้ายกับประเภท Python’s Robolink )
●RobolinkItem.m เป็นประเภทซึ่งแสดงไอเทม RoboDK ภายในฐานต้นไม้ นอกจากนี้ยังสามารถแสดงระบบปฏิบัติการที่แตกต่างกันบนไอ (คล้ายกับประเภท Python’s Robolink.Item)
●transl.m, rotx.m, roty.m and rotz.m เป็นฟังก์ชั่นซึ่งสร้างลักษณะหลายเมทริกซ์ซึ่งให้การย้ายเวกเตอร์ XYZ หรือการหมุนระหว่างแกนเฉพาะ
●Pose_2_XYZRPW.m an XYZRPW_2_Pose.m อนุญาตให้แปลงท่าทางตำแหน่ง XYZ position และ RPW มุนออยเลอร์และในทางกลับกัน ข้อมูลเพิ่มเติมดูได้ในส่วนReference Frames
ตัวอย่างโค้ดที่สามารถดูได้ในหน้าต่อไปนี้:
https://robodk.com/Matlab-API
โครงการ Simulink สามารถใช้งานได้ ดังตัวอย่างในการจำลอง, หุ่นยนต์จะถูกย้ายไประหว่างกลุ่มXYZ ซึ่งถูกสร้างขึ้นโดยพลการ
วีดีโอต่อไปนี้แสดงผลลัพธ์ของการดำเนินการแบบจำลอง:
https://www.youtube.com/watch?v=7DDBMwa0-Oc

ในส่วนนี้อธิบายถึงเส้นคำสั่งซึ่งใช้ได้เมื่อ RoboDK ได้เริ่มต้น
การเรียกต่อไปนี้เป็นการเรียกทั่วไปเกี่ยวกับการโต้เถียงบางประการ:
Robodk.exe /[option1] /[option2] open_fileA /[option3] open_fileB ...
รูปแบบไฟล์ทั้งหมดถูกสนับสนุนโดย RoboDK สามารถหาข้อโต้เถียง, รวมทั้งรูปแบบดังต่อไปนี้:
●RDK ➔ไฟล์ฐาน RoboDK: ไฟล์ชนิดนี้เป็นโครงการทั้งหมดในไฟล์เดียว, รวมทั้งการพึ่งพาอาศัยกัน (หุ่นยนต์, เครื่องมือ, ไฟล์ NC , …).
●robot ➔ไฟล์หุ่นยนต์: การโหลดไฟล์หุ่นยนต์จะสามารถสร้างหน้าต่างอ้างอิงสำหรับหุ่นยนต์
●tool ➔ไฟล์เครื่องมือ: แนบไฟล์อัตโนมัติเมื่อหุ่นยนต์ได้ถูกเพิ่ม
●stl/wrl/step/stp/iges/igs/sld ➔สิ่งของ (เรขาคณิต 3 มิติ): สิ่งของสามารถเป็นconverted to tools.
●apt/gcode/cnc ➔ไฟล์โปรแกรม NC: RoboDK เตรียมโครงการผสมผสานอย่างอัตโนมัติ (Utilities➔Milling Project).
RDK = Robolink(args='/ADDFRAME "/RENAME=Main Ref " load_object.stl')
ทางเลือกเส้นคำสั่งที่สามารถใช้งานได้:
/NOSPLASH
กำจัด the RoboDK ภาพสาดในการเริ่มต้น
/DEBUG
สร้างไฟล์ a RoboDK.debug.txt ในโฟลเดอร์ถังขยะซึ่งอนุญาตให้แก้ปัญหาแอพพลิเคชั่น
/SETTINGS=filepath
โหลดข้อโต้แย้งจากไฟล์อักษร แต่ละเส้นของไฟล์อักษรจะถูกพิจารณาเป็นหนึ่งข้อโต้แย้งเดี่ยว
/NOSHOW
ซ่อนวินโดว์ทั้งหมดขณะRoboDK กำลังถูกโหลดไฟล์และการอัพเดทโปรแกรม
/NO_WINDOWS
ซ่อนวินโดว์ทั้งหมดซึ่งถูกแสดงอย่างอัตโนมัติเมื่อการโหลดไฟล์ NC
/PORT=20501
บังคับการสื่อสาร API ผ่านทางที่ให้ (TCP/IP protocol). ค่าเริ่มต้นทางที่ 20500.
/ADDFRAME
เพิ่มหน้าต่างอ้างอิงใหม่. สิ่งของใหม่ที่ถูกโหลดจะถูกวางในหน้าต่างอ้างอิง
/RESET
บังคับซึ่งถ้าสิ่งของใหม่ถูกโหลดและจะถูกวางในหน้าต่างอ้างอิงฐาน (ไม่ใช่หน้าต่างที่เพิ่มสุดท้าย)
/RENAME=Name
เปลี่ยนชื่อของหน้าต่างอ้างอิงสุดท้ายหรือสิ่งของซึ่งได้ถูกเพิ่ม
/MOVE=x;y;z;rx;ry;rz
ย้ายหน้าต่างอ้างอิงสุดท้ายซึ่งถูกเพิ่ม (ในมิลลิเมตรและองศา)
/UPDATE_APT=YES
จะแทนที่โครงการเครื่องจักรหุ่นยนต์ซึ่งมีไฟล์ APT เหมือนกัน
/UPDATE_APT=NO
ไม่แทนที่โครงการเครื่องจักรหุ่นยนต์ใดๆ (จะสร้างโครงการซ้ำถ้ามีชื่อที่จับคู่กัน)
/UPDATE=file.apt
โหลดหรืออัพเดทไฟล์ APT และสร้างโปรแกรมหุ่นยนต์ถ้าไม่มีปัญหาใด
/REPLACE_ITEMS=YES
อัพเดทเครื่องมือที่มีอยู่และสิ่งของเมื่อไฟล์ใหม่ได้ถูกโหลดและมีการจับคู่ชื่อ
/REPLACE_ITEMS=NO
ไม่แทนที่เครื่องมือและสิ่งของอีกเมื่อไฟล์ใหม่ได้ถูกโหลด
/SETCOLOR=steelblue
ตั้งค่าสีของสิ่งของที่โหลดสุดท้าย(สิ่งของ, เครื่องมือ, หุ่นยนต์หรือเครื่องจักร) สีสามารถถูกเปลี่ยนชื่อหรือสีเลขฐานสิบหก
/AUTOGEN_MAINPROG=Prog
สร้างโปรแกรมหลักซึ่งเรียกโปรแกรมที่ถูกเชื่อมต่อไฟล์ APT ที่โหลดตามลำดับ
/SELECTTOOL=#1
ตั้งค่าเครื่องมือหุ่นยนต์แรก(หรือเลขที่เหมือนกัน) สามารถใช้เครื่องมือactive (เครื่องมือซึ่งถูกใช้เมื่อโปรแกรมใหม่ถูกโหลด)
/SELECTTOOL=tool name
เลือกเครื่องมือactive เมื่อใช้การจับคู่ชื่อ
/ADDCUTTER=length|path/cutter name.stl
เพิ่มตัวตัดให้เพิ่มเรขาคณิตของตัวตัดที่เกี่ยวข้องกับผู้ถือเครื่องมือ ตัวตัดจะถูกรักษาไว้ในRoboDK, การถือเรขาคณิตของตัวตัด เรขาคณิตจะต้องเป็นไฟล์STL (ASCII หรือเลขฐานสอง) ด้วยต้นแบบที่เคล็ดลับของเครื่องมือ ความยาวจะให้ในหน่วย มิลลิเมตร mm ซึ่งเกี่ยวข้องกับผู้ถือเครื่องมือ(แกนบวก Zของผู้ถือเครื่องมือจะต้องจุดภายนอก)
/SELECTCUTTER=cutter name
เลือกตัวตัดที่มีผลกระทบเหมือนกันกับSELECTTOOL, ตัวตัดจะถูกรักษาไว้ในเครื่องมือ
/SHOW
แสดงวินโดว์ RoboDK จะถูกทำให้เสร็จอย่างอัตโนมัติเมื่อไฟล์ทั้งหมดได้ถูกโหลดและโครงการเครื่องจักรได้ถูกอัพเดทเสร็จสิ้น
Using one of the following options will alter the visibility provoked by the /SHOW command.
/HIDDEN
หลีกเลี่ยงอัตโนมัติ /SHOW เมื่อ RoboDK ได้โหลดเสร็จแล้ว มีทางเดียวที่จะแสดงวินโดว์หลังจากการ API
/QUIT
ออกจากโปรแกรมถ้าไม่มีข้อความผิดพลาด
/END
ออกจากโปรแกรมถ้าไม่มีข้อความผิดพลาด
.