Robots ABB
RoboDK prend en charge tous les robots ABB programmés en langage RAPID, y compris les fichiers PRG et MOD (contrôleurs de robots IRC5, S4 et S4C). Cette documentation est basée sur le contrôleur de robot IRC5 ABB.
Les sections suivantes montrent les opérations typiques utilisant un Teach Pendant d’un robot ABB, par exemple, pour préparer un nouveau programme de robot dans RoboDK et le transférer au robot.
Suivre ces étapes pour charger un module de programme (fichier MOD) à partir d’une clé USB :
1.Sélectionner ABB➔Program editor
2.Sélectionner Modules, sur le haut de l’écran
3.Sélectionner File➔Load module (si vous démarrez un nouveau projet, il n’est pas important que le Pointeur du Programme / PP soit perdu)
4.Sélectionner le fichier MOD depuis la clé USB
5.Sélectionner OK
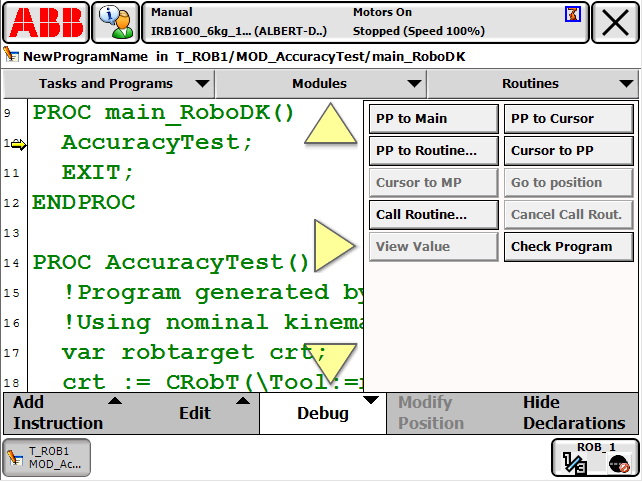
Suivre ces étapes pour démarrer un programme robot spécifique sur le contrôleur de robot ABB :
1.Passer le commutateur du contrôleur en mode manuel. Le message « Manuel » dans la barre de menus supérieure doit s’afficher.
2.Sélectionner : ABB➔Program editor➔Debug➔PP to routine
3.Sélectionner le programme généré par RoboDK. Selon le post processeur que vous utilisez, vous avez peut-être déjà la routine principale dans votre module.
4.Maintenir l’interrupteur « dead man » sur le teach pendant si vous travaillez en mode manuel. Le message Motors On dans l’état du robot doit être visible ainsi que la lumière orange du robot doit être allumée.
5.Sélectionner le bouton Play/Démarrer sur le teach pendant pour démarrer le programme.
Les étapes suivantes permettent de créer ou de modifier des outils de robot (TCP, également connu sous le nom de données d’outils dans la programmation de robot ABB) :
1.Sélectionner ABB➔Program data➔tooldata (double-cliquer)
2.Il est possible de créer ou de modifier des variables d’outils existantes
3.Une fois l’outil défini, les valeurs X, Y, Z du TCP peuvent être récupérées


Les programmes peuvent être facilement transférés via FTP depuis RoboDK pour les robots ABB :
1.Faire un clic droit sur le robot dans RoboDK
2.Sélectionner Connecter au Robot…
3.Entrer l’adresse IP du robot
4.Entrer le chemin FTP.
Le chemin complet peut être récupéré à partir du teach pendant ou en utilisant Filezilla FTP Client.
5.Entrer les informations d’authentification du FTP (par défaut anonymous)
Une fois qu’un programme RoboDK est prêt à être envoyé au robot :
1.Faire un clic droit sur un programme dans RoboDK
2.Sélectionner Envoyer programme au robot (Ctrl+F6)
Cela générera le programme et tentera de le transférer au contrôleur robot. Une fenêtre apparaîtra si le transfert FTP a réussi ou non.


Lorsque les programmes sont transférés par FTP à la volée, ils doivent être chargés en utilisant la programmation RAPID côté robot. L’exemple suivant exécutera le programme main_RoboDK à partir d’un module appelé Mod_pick_and_place:
MODULE RoboDK_FTP_Run_Program
! Enter the path to a folder with write access rights. Example:
CONST string PATH_ROBODK := "/hd0a/robot-serial-num/HOME/RoboDK";
PERS string ftp_program_loaded := ";
PROC Main()
FTP_Run_Program;
ENDPROC
PROC FTP_Run_Program()
var num module_id := -1;
WHILE module_id <= 0 DO
TPErase;
TPReadNum module_id, "Enter the program to run. For example: to run Prog2 in Module Prog2.mod type 2.";
ENDWHILE
FTP_Run_Program_ID(module_id);
ENDPROC
PROC FTP_Run_Program_ID(num module_id)
VAR string path_module := "";
VAR string mod_to_unload;
IF module_id <= 0 THEN
RETURN;
ENDIF
path_module := PATH_ROBODK + "/Prog" + NumToStr(module_id, 0) + ".mod";
IF StrLen(ftp_program_loaded) > 0 THEN
mod_to_unload := ftp_program_loaded;
ftp_program_loaded := "";
UnLoad mod_to_unload;
ENDIF
Load path_module;
ftp_program_loaded := path_module;
TPWrite "Starting program: " + path_module;
! call the main program from the module sent and loaded
! %"main_RoboDK"%;
! call the numbered program (it should have the same effect)
%"Prog"+NumToStr(module_id,0)%;
TPWrite "Program completed";
ENDPROC
ENDMODULE
Les pilotes de robot offrent une alternative à la programmation hors ligne. Les pilotes de robot vous permettent d’exécuter une simulation directement sur le robot (programmation en ligne). Plus d’informations disponibles dans la section Pilotes/Drivers de robot.
Une connexion entre RoboDK et le robot ABB peut être établie pour déplacer le robot automatiquement à partir d’un PC connecté à l’aide de RoboDK. Cela permet d’utiliser l’option Run on robot pour la programmation et le débogage en ligne. La connexion peut être établie via une connexion Ethernet (TCP/IP) ou une connexion série (RS232).
Suivre ces étapes pour configurer le pilote RoboDK pour les robots ABB :
1.Connecter l’ordinateur au robot à l’aide d’un câble Ethernet (ou d’une connexion RS232 si vous prévoyez d’utiliser une connexion série).
2.Charger le module Rdk_driversocket.mod sur le robot (à l’aide d’une clé USB, d’un transfert FTP ou de Robotstudio). Il doit être utilisé comme tâche principale et ce module contient déjà l’appel de programme principal.
Il est possible également d’utiliser le module Rdk_driverserial.mod si vous préférez utiliser la connexion RS232.
Suivre ces étapes sur le teach pendant ABB pour charger le programme :
a.Sélectionner ABB➔Program Editor
b.Sélectionner Tasks et Programs (sur le haut)
c.Sélectionner Show Modules (sur le bas)
d.Sélectionner File➔Load Module… (sélectionner YES pour perdre le pointeur du programme)
e.Sélectionner le fichier mod, puis OK.
3.Exécuter le programme Main (principal) (trouver le programme principal dans RoboDK_Driver.mod).
CONST string SERVER_IP := "192.168.125.1";
Le port de communication par défaut pour le programme fourni est 2000 mais il peut également être modifié.