ABB 로봇
RoboDK는 PRG 및 MOD 파일(IRC5, S4 및 S4C 로봇컨트롤러)을포함하여 RAPID 언어로프로그래밍이된모든 ABB 로봇을지원합니다. 이문서는 IRC5 ABB 로봇컨트롤러를기반으로합니다.
다음섹션은예를들어 RoboDK에서새로봇프로그램을준비하고이를로봇으로전송하기위해 ABB 로봇티치펜던트를사용하는일반적인작업을보여줍니다.
다음단계에따라 USB 드라이브에서프로그램모듈(MOD 파일)을로드하십시오.
1.ABB ➔프로그램편집기를선택하십시오.
2.화면상단에서모듈을선택하십시오.
3.파일➔모듈불러오기를선택하십시오(새프로젝트를시작하는경우프로그램포인터 / PP가유실되지는않습니다)
4.USB 디스크에서MOD파일을선택하십시오.
5.확인을선택하십시오.
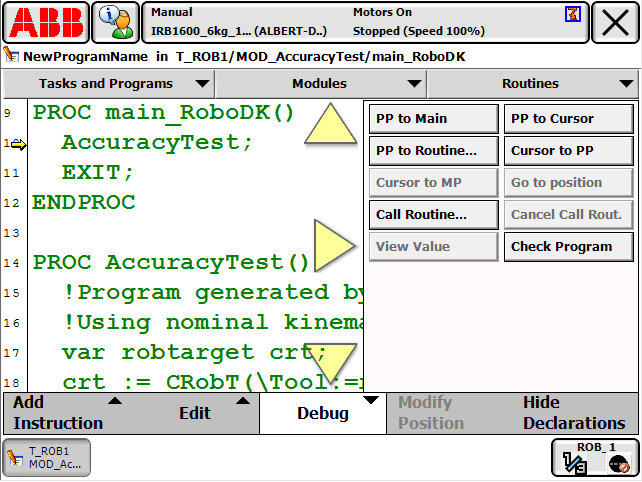
다음단계에따라 ABB 로봇컨트롤러에서특정로봇프로그램을시작하십시오.
1.컨트롤러스위치를수동모드로변경하십시오. 상단메뉴의표시줄에 "수동"메시지가표시되어야합니다.
2.ABB ➔프로그램편집기➔디버그➔ PP 루틴으로선택하십시오.
3.RoboDK가생성한프로그램을선택하십시오. 사용하는포스트프로세서에따라모듈에이미기본루틴이있을수있습니다.
4.수동모드에서작동하는경우티치펜던트의 "dead man" 스위치를잡습니다. 로봇의상태로Motors On메시지가표시되고주황색로봇표시등이켜져야합니다.
5.티치펜던트에서재생버튼을선택하여프로그램을시작합니다.
다음단계를수행하면로봇툴(TCP, ABB 로봇프로그래밍에서tooldata라고도함)을만들거나수정할수있습니다.
1.ABB ➔프로그램데이터➔ tooldata(더블클릭)을선택하십시오.
2.기존툴변수를생성하거나수정할수있습니다.
3.툴이정의되면 TCP의 X, Y, Z값을검색할수있습니다.


ABB 로봇용 RoboDK의 FTP를통해프로그램을쉽게전송할수있습니다.
1.RoboDK에서로봇을마우스오른쪽버튼으로클릭하십시오.
2.로봇에연결…을선택하십시오.
3.로봇의 IP를입력하십시오.
4.원격 FTP 경로를입력하십시오.
티치펜던트에서또는 FileZilla FTP 클라이언트를사용하여전체경로를검색할수있습니다.
5.FTP 자격증명을입력합니다(기본적으로익명).
RoboDK 프로그램을로봇에보낼준비가되면,
1.RoboDK에서프로그램을마우스오른쪽버튼으로클릭하십시오.
2.로봇에프로그램보내기(Ctrl+F6)를선택하십시오
프로그램이생성되어로봇컨트롤러로전송됩니다. FTP 전송성공여부를표시하는창이나타납니다.


프로그램은 FTP를통해즉시전송될때로봇측에서 RAPID 프로그래밍을사용하여로드해야합니다. 다음예제는 MOD_Pick_and_place라는모듈에서 main_RoboDK 프로그램을실행합니다.
MODULE RoboDK_FTP_Run_Program
! Enter the path to a folder with write access rights. Example:
CONST string PATH_ROBODK := "/hd0a/robot-serial-num/HOME/RoboDK";
PERS string ftp_program_loaded := ";
PROC Main()
FTP_Run_Program;
ENDPROC
PROC FTP_Run_Program()
var num module_id := -1;
WHILE module_id <= 0 DO
TPErase;
TPReadNum module_id, "Enter the program to run. For example: to run Prog2 in Module Prog2.mod type 2.";
ENDWHILE
FTP_Run_Program_ID(module_id);
ENDPROC
PROC FTP_Run_Program_ID(num module_id)
VAR string path_module := "";
VAR string mod_to_unload;
IF module_id <= 0 THEN
RETURN;
ENDIF
path_module := PATH_ROBODK + "/Prog" + NumToStr(module_id, 0) + ".mod";
IF StrLen(ftp_program_loaded) > 0 THEN
mod_to_unload := ftp_program_loaded;
ftp_program_loaded := "";
UnLoad mod_to_unload;
ENDIF
Load path_module;
ftp_program_loaded := path_module;
TPWrite "Starting program: " + path_module;
! call the main program from the module sent and loaded
! %"main_RoboDK"%;
! call the numbered program (it should have the same effect)
%"Prog"+NumToStr(module_id,0)%;
TPWrite "Program completed";
ENDPROC
ENDMODULE
로봇드라이버는오프라인프로그래밍의대안을제공합니다. 로봇드라이버를사용하면로봇에서직접시뮬레이션을실행할수있습니다(온라인프로그래밍). 로봇드라이버섹션에자세한정보가있습니다.
RoboDK를사용하여연결된 PC에서로봇을자동으로이동하도록 RoboDK와 ABB 로봇사이의연결을설정할수있습니다. 이를통해온라인프로그래밍및디버깅에 RoboDK의로봇에서실행옵션을사용할수있습니다. 이더넷연결(TCP / IP) 또는직렬연결(RS232)을통해연결할수있습니다.
다음단계에따라 ABB 로봇용 RoboDK 드라이버를설정하십시오.
1.이더넷케이블을사용하여컴퓨터를로봇에연결하십시오(또는직렬연결을사용하려는경우 RS232 연결).
2.RDK_DriverSocket.mod모듈을로봇에로드합니다(USB 드라이브, FTP 전송또는 RobotStudio 사용). 기본적으로사용해야하며이모듈에는이미기본프로그램호출이포함되어있습니다. RS232 연결을선호하는경우RDK_DriverSerial.mod모듈을사용하십시오.
ABB 티치펜던트에서다음단계에따라프로그램을로드하십시오.
a.ABB ➔프로그램편집기를선택하십시오.
b.맨위의작업및프로그램을선택하십시오.
c.하단의모듈표시를선택하십시오. at the bottom)
d.파일➔모듈불러오기…를선택하십시오(프로그램포인터를삭제하려면‘예’를선택하십시오).
e.mod파일을선택한다음확인을선택하십시오.
3.Main 프로그램을실행하십시오(RoboDK_Driver.mod에 Main 프로그램이있습니다).
CONST string SERVER_IP := "192.168.125.1";
제공된프로그램의기본통신포트는 2000이지만변경할수도있습니다.