หุ่นยนต์ ABB
RoboDK สนับสนุนหุ่นยนต์ ABB ทั้งหมดซึ่งถูกเขียนในภาษา RAPID, รวมถึงไฟล์ PRG และ MOD (หุ่นยนต์ควบคุม IRC5, S4 และS4C). ในเอกสารนี้เป็นพื้นฐานของหุ่นยนต์ควบคุมIRC5 ABB
ตามส่วนต่อไปนี้ ระบบปฏิบัติการสาธิตตามแบบฉบับซึ่งใช้หุ่นยนต์ ABB ซึ่งการสอน pendant เพื่อเตรียมตัวโปรแกรมใหม่ใน RoboDK เพื่อนเคลื่อนย้ายไฟล์ไปยังหุ่นยนต์
ตามขั้นตอนต่อไปนี้เพื่อโหลดโมดูลโปรแกรม(ไฟล์ MOD) จาก USB disk:
1.เลือกABB➔Program editor
2.เลือกModules, บนด้านบนสุดของหน้าจอ
3.เลือกไฟล์➔โหลดโมดูล (ไม่สำคัญสำหรับโปรแกรมตัวชี้/ PP ได้สูญหาย)
4.เลือกไฟล์ MOD จาก USB disk
5.เลือกOK
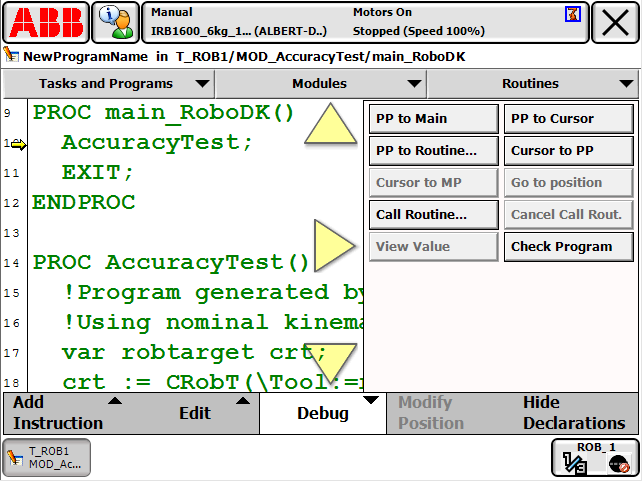
ตามขั้นตอนดังต่อไปนี้เพื่อเริ่มโปรแกรมหุ่นยนต์เฉพาะในหุ่นยนต์ควบคุม ABB:
1.สามารถสลับตัวควบคุมเป็นโหมดคู่มือการใช้ข้อความ “Manual” บนด้านบนของแถบเมนูควรจะถูกแสดงผล
2.เลือก: ABB➔Program editor➔Debug➔PP to routine
3.เลือกโปรแกรมที่ถูกสร้างโดย RoboDK main_RoboDK เป็นชื่อค่าเริ่มต้น
4.กดค้าง “dead man” เพื่อสลับจากการสอนpendant ข้อความ “เปิดมอเตอร์” ตามสถานะของหุ่นยนต์ควรจะเห็นได้ด้วยแสงหุ่นยนต์สีส้มควรจะเปิด
5.เลือกปุ่มเล่นบนการสอน pendant เพื่อเริ่มต้นโปรแกรม
ตามขั้นตอนดังต่อไปนี้เพื่อให้สร้างหรือดัดแปลงเครื่องมือหุ่นยนต์(TCP, รู้จักกันในชื่อtooldataในการเขียนโปรแกรม ABB):
1.เลือกABB➔Program data➔tooldata (ดับเบิ้ลคลิก)
2.เป็นไปได้ที่จะสร้างหรือดัดแปลงตัวแปรเครื่องมือที่มีอยู่
3.เมื่อเครื่องมือได้ถูกกำหนด เราสามารถให้ค่า X,Y,Z ของ TCP สามารถถูกดึงข้อมูลได้


โปรแกรมสามารถถูกเคลื่อนย้ายอย่างง่ายดายผ่าน RoboDK สำหรับหุ่นยนต์ ABB:
1.คลิกขวาที่หุ่นยนต์ใน RoboDK
2.เลือกConnect to robot…
3.ป้อน IP ของหุ่นยนต์
4.เข้าสู่วิธีการรีโมท FTP
เส้นทางที่สำเร็จสามารถถูกทดสอบจากการสอน pendant หรือการใช้ FileZilla FTP Client
5.ป้อนหนังสือรับรอง FTP (ไม่ระบุโดยการเริ่มต้น)
เมื่อโปรแกรม RoboDK ได้พร้อมที่จะส่งไปถึงหุ่นยนต์แล้ว:
1.คลิกขวาโปรแกรมใน RoboDK
2.เลือกSend program to robot (Ctrl+F6)
จะเป็นการสร้างโปรแกรมและพยายามถ่ายโอนไปถึงหุ่นยนต์ควบคุม วินโดว์จะป็อปอัพแสดงขึ้นถ้าการถ่ายโอน TFP ได้ถูกทำให้สำเร็จหรือไม่ก็ตาม


เมื่อโปรแกรมถูกถ่ายโอนผ่าน FTP เราจำเป็นต้องถูกโหลดโดยการใช้การเขียนโปรแกรม RAPID บนด้านชองหุ่นยนต์ ตัวอย่างต่อไปนี้จะดำเนินการโดยโปรแกรมmain_RoboDK จากโมดูลที่เรียกว่า MOD_Pick_and_place:
PERS bool progloaded := FALSE;
. . .
PROC Run_Program_FTP()
IF (progloaded=FALSE) THEN
Load "/hd0a/serialnum/HOME/RoboDK/MOD_Pick_and_place.mod";
progloaded = TRUE;
ELSE
UnLoad "/hd0a/serialnum/HOME/RoboDK/MOD_Pick_and_place.mod";
progloaded = FALSE;
Load "/hd0a/serialnum/HOME/RoboDK/MOD_Pick_and_place.mod";
progloaded = TRUE;
ENDIF
%main_RoboDK%; !call the main program from the module send and loaded
ENDPROC
ไดร์เวอร์หุ่นยนต์มีทางเลือกสำหรับการเขียนโปรแกรมออฟไลน์ (ซึ่งโปรแกรมได้ถูกสร้างขึ้น, จากนั้น, ถ่ายโอนหุ่นยนต์และสร้างขึ้น) ด้วยไดร์เวอร์หุ่นยนต์, อีกทั้งยังสามารถดำเนินการบนหุ่นยนต์โดยตรง (การเขียนโปรแกรมออนไลน์) ข้อมูลเพิ่มเติมดูได้ในส่วนRobot Drivers
การเชื่อมต่อระหว่างหุ่นยนต์RoboDK และ ABB สามารถถูกจัดตั้งขึ้นเพื่อย้ายหุ่นยนต์ออย่างอัตโนมัติจากการเชื่อมต่อ PC โดยใช้ RoboDK เป็นการอนุญาตใช้ RoboDK ทางเลือกRunonrobot สำหรับการเขียนโปรแกรมออนไลน์และการแก้ปัญหา การเชื่อมต่อสามารถจัดตั้งขึ้นผ่านการเชื่อมต่อพื้นฐาน Ethernet(TCP/IP)
ตามขั้นตอนต่อไปนี้เพื่อตั้งค่าไดร์เวอร์ RoboDK สำหรับหุ่นยนต์ ABB:
1.จัดตั้งการเชื่อมต่อ Ethernet ระหว่างคอมพิวเตอร์และหุ่นยนต์
2.ถ่ายโอนไฟล์MainModule.modและCOMM.modถึงหุ่นยนต์ (ถ่ายโอนโดย USB disk, FileZilla FTP หรือ RobotStudio สามารถถูกใช้ได้) ควรจะถูกใช้เหมือนกับงานหลัก
3.ทำตามขั้นตอนต่อไปนี้บนการสอนpendant ABB เพื่อโหลดโปรแกรมจากการสอน pendant:
a.เลือกABB➔Program Editor
b.เลือกTasksและPrograms (ข้างบน)
c.เลือกShow Modules (ตรงกลาง)
d.เลือกFile➔Load Module… (เลือก YES เพื่อสูญเสียตัวชี้โปรแกรม)
e.เลือกไฟล์COMM.mod , จากนั้นเลือก OK
f.เลือกไฟล์MainModule.mod, จากนั้นเลือกOK
4.ดำเนินการโปรแกรมMain (คุณจะพบโปรแกรมหลักใน MainModule.mod)
CONST string server_ip := "192.168.125.1";
Port การติดต่อสื่อสารเริ่มต้นสำหรับการจัดหาโปรแกรมเป็น 2000ถ้ามันสามารถถูกเปลี่ยนได้ด้วย