Fanuc Roboter
RoboDK unterstützt alle Fanuc Robotersteuerungen seit RJ2, inklusive RJ3, R-30iA und R-30iB. Diese Dokumentation basiert auf dem R-30iA Fanuc Controller.
Die folgende Dokumentation beschreibt das typische Vorgehen, beim Verwenden eines Fanuc Handprogrammiergeräts, um ein neues Programm in RoboDK vorzubereiten und auf den Roboter zu übertragen.
Sie müssen den folgenden Schritt folgen, um ein Programm von einem USB Speicher zu laden:
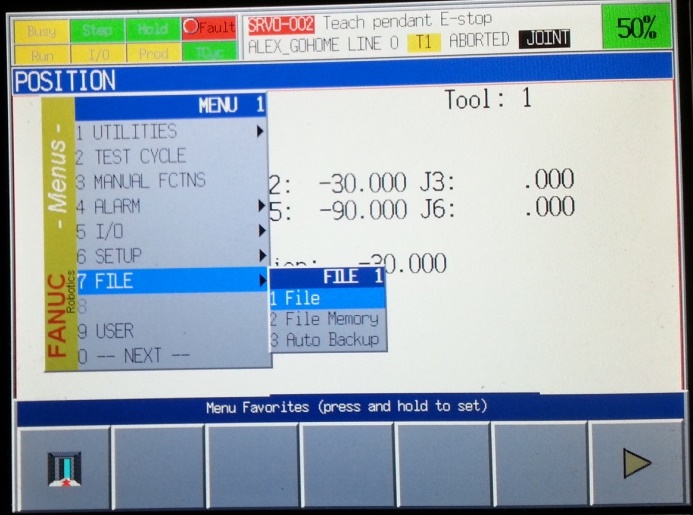
1.Wählen Sie MENU➔File
2.Wählen Sie Utilities➔Select Device➔USB
3.Wählen Sie DIR
4.Wählen Sie das TP oder das LS Programm vom USB Speicher (z.B. BALLBARTEST.TP)
Dies speichert die Datei automatisch in den FR Speicher des Controllers
5.Wählen Sie das Programm im FR Speichern und wählen Sie LOAD (Bildschirm Knopf)

Folgen Sie diesen Schritten um ein Roboterprogramm zu starten:
1.Wählen Sie FCN (Handprogrammiergerät)➔Abort all
2.Wählen Sie SELECT (Handprogrammiergerät)
3.Wählen Sie das Programm (beispielsweise BALLBARTEST)
4.Halten Sie den Totmannschalter
5.Wählen Sie RESET. Alle Alarme sollten verschwinden.
6.Drücken und halten Sie den SHIFT Knopf auf dem Handprogrammiergerät
7.Wählen Sie FWD (Handprogrammiergerät)

Um die aktuellen Achswinkel zu erhalten, müssen Sie diesen Schritten folgen:
1.Wählen Sie POSN (Handprogrammiergerät) um die aktuelle Roboterposition zu sehen
2.Wählen Sie COORD (Handprogrammiergerät) um den achsspezifischen Modus zu wählen


Die folgenden Schritte ermöglich es Roboter Werkzeuge zu erstellen, oder zu bearbeiten. (TCP, auch bekannt als UTOOL innerhalb von Fanucs Programmierumgebung):
1.Wählen Sie MENU➔Setup➔Frames
2.Wählen Sie ein Werkzeug um die X,Y,Z Koordinaten zu lesen oder zu bearbeiten



Robotertreiber stellen eine Alternative zur Offline Programmierung (ein Programm wird erstellt und dann auf den Roboter übertragen und ausgeführt) dar. Mit Robotertreibern ist es möglich eine Simulation direkt auf dem Roboter auszuführen (Online Programmierung). Weitere Informationen finden Sie im Abschnitt Robotertreiber.
Eine Verbindung zwischen RoboDK und dem Fanuc Roboter kann hergestellt werden, um den Roboter automatisch von einem verbundenen PC aus, mittels RoboDK, zu steuern. Dies erlaubt es die RoboDK Funktion Auf Roboter ausführen zur Online Programmierung und dem Debugging auszuführen. Die Verbindung kann mittels einer standardmäßigen Ethernet-Verbindung (TCP/IP) hergestellt werden.
Folgen Sie diesen Schritten um einen RoboDK Robotertreiber für Fanuc einzustellen:
1.Zunächst müssen die folgenden Dateien übertragen werden (Die Dateien können mit diesem Dokument zur Verfügung gestellt werden):
a.AAA_COM.PC➔ Hauptprogramm für die Kommunikation.
Dieses Programm muss für eine Kommunikation mit RoboDK gestartet werden.
b.GO_MJ.TP
c.GO_ML.TP
d.GO_MC.TP
Folgen Sie diesen Schritten auf dem Handprogammiergerät um den Kommunikations-Port zwischen einem Fanuc Roboter und RoboDK vorzubereiten:
2.Wählen Sie Select➔Menu-Setup-Host comm-[show]-Servers-Select 3-Select “S3”-Enter.
a.Setzen Sie Protocol auf SM
b.Setzen Sie den Port auf P3: (Port 2)
c.Setzen Sie Inaktivitäts Timeout auf 9999
3.Wählen Sie Select➔Menu-Next-System-Variables.
a.Wählen Sie $HOSTS_CFG
b.Wählen Sie Nummer 3
c.Setzen Sie $SERVER_PORT auf 2000
($HOSTS_CFG[3].$SERVER_PORT = 2000)
4.Zurück zum vorhergehenden Menü:
Wählen Sie Select➔Menu-setup-host comm-[show]-Servers-3 S3-enter
a.Setzen Sie den Startup state auf START
b.Setzen Sie den Current state auf STARTED:
Um dies zu tun, wählen Sie zunächst ACTION-DEFINE, anschließend ACTION-START
Der Port 2000 wird standardmäßig für RoboDK und Fanuc verwendet. Der Port in Abschnitt 2.c kann anders sein, jedoch muss dann der gleiche Port in RoboDK (Feld „Roboter Port“) spezifiziert sein.
Dieser Abschnitt erklärt den Unterschied zwischen Fanuc LS und TP Programm Dateien und darüber hinaus auch wie man Fanuc Programme kompiliert.
Eine binäre Datei wird benötigt um Programme auf Fanuc Robotern auszuführen (TP, ebenfalls bekannt als TPP). Programme, die über Offline Programmier-Software (wie RoboDK) für Fanuc Roboter erstellt wurden, sind im LS Format (ASCII, lesbar, nicht kompiliert). Es gibt zwei Möglichkeiten um LS Roboter Programme in TP Programme umzuwandeln:
1.Aktivieren Sie die Option ASCII Upload für den Roboter. Diese Option ist möglicherweise bereits auf dem Roboter verfügbar. Der beste Weg, um zu prüfen, ob diese Option verfügbar ist, besteht darin, dem Roboter eine LS-Datei zur Verfügung zu stellen, die automatisch in eine TP-Datei konvertiert werden sollte. Zum Beispiel, legen Sie die Datei im FR Laufwerk ab und wählen Sie "LOAD" am Programmiergerät.
2.Kompilieren Sie das Programm mit den WinOLPC-Tools von Roboguide. In diesem Fall kann derselbe Computer, auf dem RoboDK installiert ist, das LS-Programm automatisch mit dem Compiler-Tool "maketp.exe" von Fanuc kompilieren. Dieser Befehl benötigt die Datei «robot.ini». Diese Datei kann mit dem Dienstprogramm "setrobot.exe" von WinOLPC generiert werden, wenn Roboguide installiert wurde und eine Arbeitsstation auf dem Computer gespeichert wurde ("Work Cell").
RoboDK ermöglicht den automatischen Abruf des TP-Programms direkt nach der Generierung eines LS-Programms. RoboDK verwaltet die WinOLPC-Tools automatisch, um LS-ASCII-Programme in TP-Binärprogramme übersetzen zu können.
Nachfolgend sind die Schritte dargestellt, denen RoboDK direkt folgt, nachdem ein LS-Programm generiert wurde:
1.Nach dem Generieren eines LS-Programms wird standardmäßig der folgende Bildschirm angezeigt. Es ist möglich den Roboter aus einer Roboguide "Arbeitszelle" auszuwählen oder einfach das Programm nicht zu kompilieren. Wenn "Nein" ausgewählt ist, wird die letzte "robot.ini" Datei verwendet. Wenn keine "robot.ini" Datei existiert, wird RoboDK automatisch "setrobot.exe" ausführen, um die "robot.ini" Datei zu erzeugen.

2.Die ausführbare Datei "maketp.exe" wird verwendet, um das TP-Programm zu erzeugen.
3.Der folgende Bildschirm wird angezeigt, wenn die TP-Datei oder die "robot.ini" Datei nicht generiert werden kann. In diesem Fall ist es möglich, dass der Lese-/Schreibzugriff in bestimmten Ordnern eingeschränkt ist. Es könnte auch sein, dass Roboguide nicht richtig installiert wurde oder, dass in Roboguide keine "Arbeitszelle" erzeugt wurde.

In diesem Fall müssen die Inhalte des folgenden standardmäßigen Ordners:
C:\Program Files (x86)\FANUC\WinOLPC\bin
In diesen kopiert werden:
C:\RoboDK\api\Fanuc
Wie im folgenden Bild gezeigt. Dies erlaubt es die robot.ini Datei im gleichen Ordner zu erstellen, wo die ausführbare Datei “maketp.exe” bleibt. Diese Datei wird benötigt, um Programme zu kompilieren. Darüber hinaus ist es wichtig, die Roboguide « Work Cell » in einem Ordner zu speichern, auf welchen alle Benutzer, die Programme kompilieren, Lesezugriff haben.

Sobald die Dateien im richtigen Ordner abgelegt wurden, ist es möglich die Kompilierung zu testen, indem man wie im folgenden Bild Set Fanuc Robot auswählt (Menü: Tools➔Options➔Program).

Es ist ebenfalls möglich in diesem Fenster zu definieren, welche Register verwendet werden, um Fanuc Roboter Programme zu erstellen.
Alternativ können benutzerdefinierte Postprozessoren verwendet werden, um all diese Operationen an den Benutzer anzupassen. Zwei benutzerdefinierte Postprozessoren kommen bereits mit dem Standard Paket von RoboDK für Fanuc Roboter (Fanuc_R30iA und Fanuc_RJ3).