หุ่นยนต์ Fanuc
RoboDK สนับสนุนหุ่นยนต์ควบคุม Fanuc ทั้งหมดตั้งแต่ RJ2, รวมถึง RJ3, R-30iA และ R-30iB เอกสารอ้างอิงนี้เป็นพื้นฐานของตัวควบคุมFanuc R-30iA
ตามส่วนต่อไปนี้เป็นระบบปฏิบัติการสาธิตโดยใช้หุ่นยนต์Fanuc สอน pendant เพื่อเตรียมโปรแกรมใหม่ใน RoboDK และเคลื่อนย้ายมันเข้าสู่หุ่นยนต์
เราต้องทำตามขั้นตอนเหล่านี้เพื่อโหลดโปรแกรมจาก USB disk:
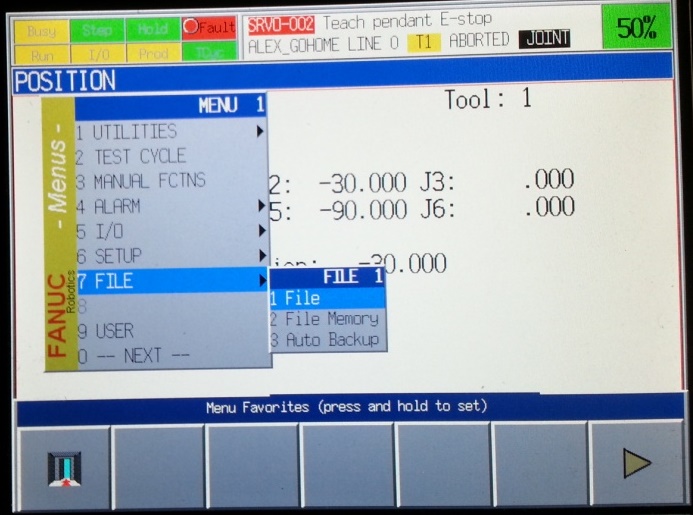
1.เลือกMenu➔File
2.เลือกUtilities➔Set device➔USB
3.เลือกDIR
4.เลือกโปรแกรมไฟล์ the TP หรือ LS จาก USB disk (BALLBARTEST.TP สำหรับตัวอย่าง)
มันจะเป็นการบันทึกไฟล์อย่างอัตโนมัติสำหรับหน่วยความจำFRของตัวควบคุม
5.เลือกโปรแกรมในหน่วยความจำFRและเลือก LOAD (ปุ่มหน้าจอ)

สำคัญ: ASCII Upload จำเป็นสำหรับการเขียนโปรแกรมออฟไลน์ เป็นการอนุญาตให้โหลดไฟล์ LS โดยตรงจากหุ่นยนต์มีอีกทางเลือกหนึ่ง, โปรแกรม LS (ไฟล์ASCII) สามารถถูกใช้งานผ่านโปรแกรม TP (ไฟล์เลขฐานสอง) จาก PC โดยการใช้เครื่องมือ Fanuc’s WinOLPC (MakeTP)
สำคัญ: สำหรับความเร็วเส้นตรงของโปรแกรมถูกสร้างขึ้นโดย RoboDK กำหนดโดยการลงทะเบียน R[10] โดยค่าเริ่มต้น ความเร็วจะไม่ถูกตั้งค่าในโปรแกรมซึ่งจะถูกตั้งค่าเอง ในกรณีนั้น:
เลือก: DATA➔Type➔Register, R[10]=50 (สำหรับความเร็ว 50 mm/s)
ทำตามขั้นตอนต่อไปนี้เพื่อเริ่มต้นโปรแกรมหุ่นยนต์:
1.เลือกFCN (ปุ่มสอน pendant)➔Abort all
2.เลือก SELECT (teach pendant button)
3.เลือกโปรแกรม (BALLBARTEST สำหรับตัวอย่าง)
4.กดและค้างที่สวิทช์Deadman
5.เลือกRESET. ทุกการแจ้งเตือนจะไม่ปรากฏ
6.เลือกและค้างปุ่ม SHIFTของการสอน
7.เลือกFWD (ปุ่มบนการสอน pendant)

ดึงจุดร่วมหุ่นยนต์กลับคืนมาเราต้องทำตามขั้นตอนดังต่อไปนี้:
1.เลือกPOSN (ปุ่มในการสอน pendant) เพื่อจะได้เห็นตำแหน่งหุ่นยนต์ล่าสุด
2.เลือกCOORD (ปุ่มในการสอน pendant) เพื่อเลือกโหมดร่วมกัน


ทำตามขั้นตอนต่อไปนี้เพื่อการสร้างและการดัดแปลงเครื่องมือหุ่นยนต์ (TCP, รู้จักกันในชื่อUTOOLในการเขียนโปรแกรมหุ่นยนต์Fanuc):
1.เลือกMENU➔Setup➔Frames
2.เลือกเครื่องมือ, ดัดแปลงและอ่านค่าพิกัด X,Y,Z



ไดร์เวอร์หุ่นยนต์มีทางเลือกสำหรับการเขียนโปรแกรมออฟไลน์ (ซึ่งโปรแกรมได้ถูกสร้างขึ้น, จากนั้น, ถ่ายโอนหุ่นยนต์และสร้างขึ้น) ด้วยไดร์เวอร์หุ่นยนต์, อีกทั้งยังสามารถดำเนินการบนหุ่นยนต์โดยตรง (การเขียนโปรแกรมออนไลน์) ข้อมูลเพิ่มเติมดูได้ในส่วนRobot Drivers
การเชื่อมต่อระหว่างหุ่นยนต์RoboDK และ Fanuc สามารถถูกจัดตั้งขึ้นเพื่อย้ายหุ่นยนต์อย่างอัตโนมัติจากการเชื่อมต่อ PC โดยใช้ RoboDK เป็นการอนุญาตใช้ RoboDK ทางเลือกRunonrobotสำหรับการเขียนโปรแกรมออนไลน์และการแก้ปัญหา การเชื่อมต่อสามารถจัดตั้งขึ้นผ่านการเชื่อมต่อพื้นฐานEthernet(TCP/IP)
ตามขั้นตอนต่อไปนี้เพื่อตั้งค่าไดร์เวอร์ RoboDK สำหรับหุ่นยนต์ Fanuc:
1.เราจะต้องถ่ายโอนต่อไปนี้ก่อน (ไฟล์เหล่านี้อาจจะหาได้ในเอกสารนี้):
a.AAA_COM.PC➔โปรแกรมหลักซึ่งจัดการการติดต่อสื่อสาร
โปรแกรมนี้จะต้องเริ่มต้นการติดตั้งการติดต่อสื่อสารด้วย RoboDK
b.GO_MJ.TP
c.GO_ML.TP
d.GO_MC.TP
ตามขั้นตอนเหล่านี้บนการสอนหุ่นยนต์ pendant เพื่อเตรียม port การสื่อสารระหว่างหุ่นยนต์ Fanuc และ RoboDK:
2.เลือกSelect➔Menu-Setup-Host comm-[show]-Servers-Select 3-Select “S3”- ป้อนค่า
a.ตั้งค่าโปรโตคอลเป็นSM
b.ตั้งค่า Port เป็นP3: (Port 2)
c.ตั้งค่าความอยู่เฉยTimeoutเป็น9999
3.เลือกSelect➔Menu-Next-System-Variables.
a.เลือก$HOSTS_CFG
b.เลือกเลข 3
c.เลือก$SERVER_PORTถึง 2000
($HOSTS_CFG[3].$SERVER_PORT = 2000)
4.กลับไปสู่เมนูก่อนหน้านี้:
เลือก Select➔Menu-setup-host comm-[show]-Servers-3 S3-ป้อนค่า
a.ตั้งค่าสถานะเริ่มต้นเป็นSTART
b.ตั้งค่าสถานะล่าสุดเป็นSTARTED:
เมื่อต้องการทำเช่นนั้น, เลือกACTION-DEFINE, จากนั้นACTION-START
The port 2000 ถูกใช้เป็นค่าเริ่มต้นสำหรับทั้ง RoboDK และ Fanuc The port ในส่วน 2.c สามารถทำให้แตกต่างถ้า port เดิมจำเป็นต้องถูกทำให้เฉพาะใน RoboDK (“Robot port” ข้อมูล)
ในส่วนนี้จะอธิบายความแตกต่างระหว่างไฟล์โปรแกรมFanuc LS และ TP ในวิธีการรวบรวมโปรแกรมสำหรับหุ่นยนต์ Fanuc
ไฟล์เลขฐานสองจำเป็นต้องดำเนินการโปรแกรมหุ่นยนต์บนหุ่นยนต์ Fanuc(TP, รู้จักกันในชื่อ TPP) โปรแกรมสำหรับหุ่นยนต์ Fanuc ถูกสร้างขึ้นโดยซอฟต์แวร์การเขียนโปรแกรมออฟไลน์ (เช่นRoboDK) เป็นรูป LS t (ASCII, ข้อความที่สามารถอ่านได้และยังไม่ถูกรวบรวม) มีทั้งหมดสองทางเลือกเพื่อแปลงโปรแกรมหุ่นยนต์ LS เป็นโปรแกรม TP:
1.มีซอฟต์แวร์ASCII Uploadบนหุ่นยนต์ ทางเลือกนี้อาจจะใช้งานได้บนหุ่นยนต์เรียบร้อยแล้ว วิธีที่ดีที่สุดในการตรวจสอบวิธีนี้คือจัดหาไฟล์ LS ไปถึงหุ่นยนต์และควรแปลงไฟล์ TP อย่างอัตโนมัติ ดังตัวอย่าง, วางไฟล์บน disk FR และเลือก “LOAD” บนการสอน pendant
2.รวบรวมโปรแกรมโดยการใช้เครื่องมือ WinOLPC จาก Roboguide ในกรณีนี้, คอมพิวเตอร์เครื่องเดียวกันที่ RoboDK ถูกติดตั้งสามารถรวบรวมโปรแกรม LS อย่างอัตโนมัติโดยการใช้ “maketp.exe” เครื่องมือตัวรวบรวมจาก Fanuc. คำสั่งนี้ต้องการไฟล์ « robot.ini » file. ไฟล์นี้สามารถถูกสร้างด้วยประโยชน์ของsetrobot.exe” จาก WinOLPC ถ้า Roboguide ถูกติดตั้งและสถานที่ทำงานถูกบันทึกบนคอมพิวเตอร์(“เซลล์ทำงาน”)
RoboDK อนุญาตให้รับโปรแกรม TP ที่ถูกต้องอย่างอัตโนมัติหลังจากที่โปรแกรม LS ได้ถูกสร้างขึ้นแล้ว RoboDK บริหารจัดการเครื่องมือ WinOLPC อย่างอัตโนมัติเพื่อที่จะสามารถรวบรวมโปรแกรม LS ASCII ลงในโปรแกรมเลขฐานสอง
ขั้นตอนเหล่านี้ RoboDK ติดตามทันทีหลังจากที่โปรแกรม LS ได้ถูกสร้างขึ้นแล้ว:
1.หน้าจอดังต่อไปนี้ปรากฏค่าเริ่มต้นหลังจากที่สร้างโปรแกรม LS อีกทั้งสามารถเลือกหุ่นยนต์จาก Roboguide “เซลล์ทำงาน” หรือไม่รวบรวมโปรแกรม ถ้า “ไม่” ถูฏเลือกไฟล์“robot.ini”สุดท้ายจะถูกใช้ถ้าไฟล์ “robot.ini” ไม่เกิดขึ้น, RoboDK จะดำเนินการ “setrobot.exe” อัตโนมัติเพื่อสร้างไฟล์“robot.ini”

2.ปฏิบัติการ “maketp.exe” ถูกใช้เพื่อสร้างโปรแกรมTP
3.หน้าจอต่อไปนี้ปรากฏ ถ้าไฟล์ TP หรือไฟล์“robot.ini” ไม่สามารถถูกสร้างขึ้น ในกรณีนี้, เป็นไปได้ซึ่ง อ่าน/เขียนการเข้าถึงถูกจำกัดไว้ในไฟล์ที่แน่นอน มันควรจะเป็น Roboguide ได้มีการถูกติดตั้งหรือ “เซลล์ทำงาน” ไม่เคยถูกสร้างมาก่อนใน Roboguide

ในกรณีนี้, เนื้อหาบนโฟลเดอร์ดังกล่าวจะต้องถูกคัดลอกจากโฟลเดอร์เริ่มต้น:
C:\Program Files (x86)\FANUC\WinOLPC\bin
ถึงโฟลเดอร์:
C:\RoboDK\api\Fanuc
ตามที่แสดงในรูปถัดมาอนุญาตให้สร้างไฟล์robot.iniในโฟลเดอร์เดียวกันที่ปฏิบัติการ“maketp.exe” ยังคงอยู่ ไฟล์นี้จำเป็นต้องถูกรวบรวมโปรแกรม ซึ่งสำคัญต่อการบันทึก Roboguide « เซลล์ทำงาน » บนโฟลเดอร์ที่อ่านได้โดยผู้ใช้ทั้งหมดซึ่งจะต้องรวบรวมโปรแกรม

เมื่อไฟล์ได้ถูกวางบนโฟลเดอร์ที่ถูกต้องแล้ว, มันจะต้องทดสอบการรวบรวมโดยการSet Fanuc Robot, ตามที่แสดงในรูปถัดไป
(menu: Tools➔Options➔Program)

อีกทั้งยังสามารถกำหนดวินโดว์นี้ซึ่งลงทะเบียนจะถูกใช้สร้างโปรแกรมหุ่นยนต์ Fanuc
อีกทางเลือกหนึ่ง,การปรับแต่งหน่วยประมวลผลสามารถถูกใช้ให้ดีขึ้นเพื่อปรับแต่งระบบปฏิบัติทั้งหมดเหล่านี้ สองการปรับแต่งหน่วยประมวลผลซึ่งจัดหามากับแพ็คเกจค่าเริ่มต้น RoboDK สำหรับหุ่นยนต์ Fanuc(ถูกเรียกว่า Fanuc_R30iAและFanuc_RJ3)