Motoman Roboter
RoboDK unterstützt sämtliche Motoman Robotersteuerung seit SV3.
Die folgenden Abschnitte zeigen die typischen Schritte, bei der Verwendung eines SV3 Handprogrammiergeräts.
Robotertreiber bieten eine Alternative zur Offline-Programmierung (bei der ein Programm generiert, dann zum Roboter übertragen und ausgeführt wird). Mit Robotertreibern ist es möglich, eine Simulation direkt am Roboter durchzuführen (Online-Programmierung). Weitere Informationen finden Sie im Abschnitt Robotertreiber.
Eine Verbindung zwischen RoboDK und einem beliebigen Motoman-Roboter kann hergestellt werden, um den Roboter automatisch von einem angeschlossenen PC zu bewegen. Hierbei werden RoboDK und Motomans MotoCom-Softwareoption verwendet. Dies ermöglicht die Verwendung der RoboDK-Option auf Roboter ausführen für die Online-Programmierung, sowie das Debugging. Die Verbindung kann über eine Standard-Ethernet-Verbindung (TCP / IP) oder auch eine serielle RS232-Kommunikation hergestellt werden.
Dieser Schritt geschieht automatisch und es müssen keine spezifischen Einstellungen auf Seiten des Roboters vorgenommen werden.
Motoman-Roboter benötigen die Impulse pro Grad für jedes Gelenk, um die Impulsverbindungswerte in Gelenkwinkelwerte und umgekehrt umzuwandeln. RoboDK führt diese Umwandlung automatisch durch, wenn die nötigen Informationen in den Roboterparametern zur Verfügung gestellt werden. Um die Informationen zur Verfügung zu stellen oder zu aktualisieren, gehen Sie wie folgt vor:
1.Doppelklicken Sie auf den Roboter in RoboDK
2.Wählen Sie Parameter
3.Wählen Sie Erweiterte Optionen freischalten
4.Sie können nun die Impulse/Grad für jede Gelenkverbindung ansehen und aktualisieren
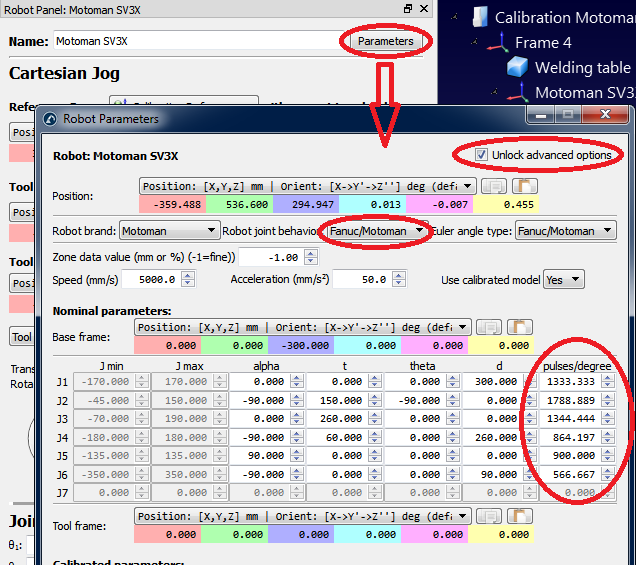
Es ist darüber hinaus wichtig zu beachten, dass einige Motoman-Roboter eine Verbindung zwischen den Achsen 2 und 3 haben. Dies bedeutet, dass sich das Gelenk 3 bewegt, wenn das Gelenk 2 bewegt wird. In diesem Fall muss das Feld Gelenkverhalten des Roboters auf Fanuc/Motoman geändert werden.