หุ่นยนต์ Motoman
RoboDK สนับสนุนหุ่นยนต์ควบคุมMotoman ทั้งหมดตั้งแต่SV3
ส่วนต่อไปนี้สาธิตระบบปฏิบัติการการใช้หุ่นยนต์ SV3 เพื่อการสอน pendant
ไดร์เวอร์หุ่นยนต์มีทางเลือกสำหรับการเขียนโปรแกรมออฟไลน์ (ซึ่งโปรแกรมได้ถูกสร้างขึ้น, จากนั้น, ถ่ายโอนหุ่นยนต์และสร้างขึ้น) ด้วยไดร์เวอร์หุ่นยนต์, อีกทั้งยังสามารถดำเนินการบนหุ่นยนต์โดยตรง (การเขียนโปรแกรมออนไลน์) ข้อมูลเพิ่มเติมดูได้ในส่วนRobot Drivers
การเชื่อมต่อระหว่างหุ่นยนต์RoboDK และ Motoman สามารถถูกจัดตั้งขึ้นเพื่อย้ายหุ่นยนต์อย่างอัตโนมัติจากการเชื่อมต่อ PC โดยใช้ RoboDK เป็นการอนุญาตใช้ RoboDK ทางเลือกRunonrobotสำหรับการเขียนโปรแกรมออนไลน์และการแก้ปัญหา การเชื่อมต่อสามารถจัดตั้งขึ้นผ่านการเชื่อมต่อพื้นฐาน Ethernet(TCP/IP)
ขั้นตอนนี้เป็นอัตโนมัติและไม่มีความจำเป็นเพื่อตั้งค่าเฉพาะบนด้านหุ่นยนต์
หุ่นยนต์ Motoman ต้องการหน่วยการวัดต่อองศาของแต่ละ joint เพื่อแปลงค่าหน่วยการวัด joint เพื่อค่าเชิงมุมและในทางกลับกัน RoboDK ทำการแปลงอัตโนมัติ ถ้าข้อมูลนี้ถูกหาได้ด้วยค่าพารามิเตอร์หุ่นยนต์ เพื่อทำให้เฉพาะถ้าข้อมูลนี้ถูกจัดหาหรืออัพเดท:
1.ดับเบิ้ลคลิกหุ่นยนต์ใน RoboDK
2.เลือกParameters
3.เลือก Unlock advanced options
4.ทบทวนหรืออัพเดทค่าหน่วยการวัด/องศาของแต่ละ joint
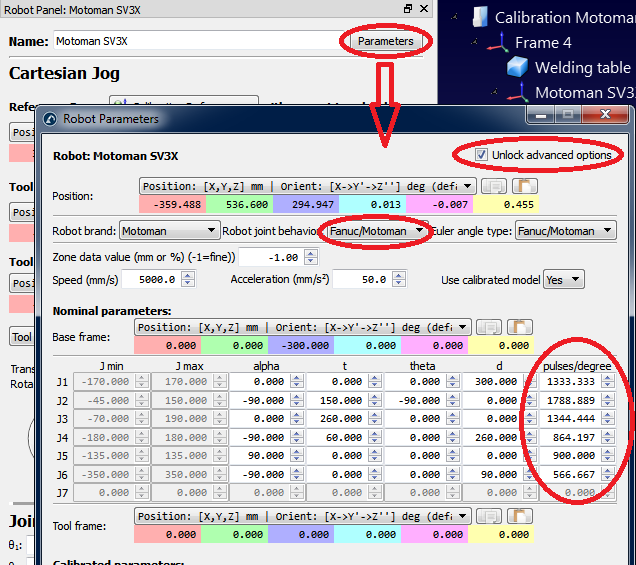
อีกทั้ง,ยังสำคัญที่จะจดบันทึกหุ่นยนต์ Motoman ที่มีการจับคู่กันระหว่าง 2 และ 3joint นั้นหมายความว่าจุดร่วม 3 จุดเลื่อนย้ายเมื่อ จุดร่วมที่ 2 ถูกย้าย ในกรณีนี้, ข้อมูลRobot joint behavior จะต้องถูกตั้งค่าเป็น Fanuc/Motoman