



J-usSuspension
designed by Alessandro Zambelli
J-us comes from an unusual interpretation of the traditional chandelier
with arms, where the technological innovation and research on materials are completely concealed from view. The warm and remarkable luminous performance and the light, dynamic design of great visual appeal give rooms a refined tone without ever overstating the image.


A09-A
J-us A configuration
A09-A
J-us A configuration
Main specifications
| Typology | Suspension | ||
|---|---|---|---|
| Application | Indoor | ||
| Material |
|
||
| Finishes |
|
||
| Dimensions (in) | H body 11.8, cable max 118, D ø 19.3 | ||
| Weight (lb) | 3.37 lbs | ||
| Light Source | LED module 21W, 2700K | ||
| Insulation Class | I |
A09-C
J-us C configuration
A09-C
J-us C configuration
Main specifications
| Typology | Suspension | ||
|---|---|---|---|
| Application | Indoor | ||
| Material |
|
||
| Finishes |
|
||
| Dimensions (in) | H body 21.3, cable max 118, L 920 | ||
| Weight (lb) | 3.37 lbs | ||
| Light Source | LED module 21W, 2700K | ||
| Insulation Class | I |
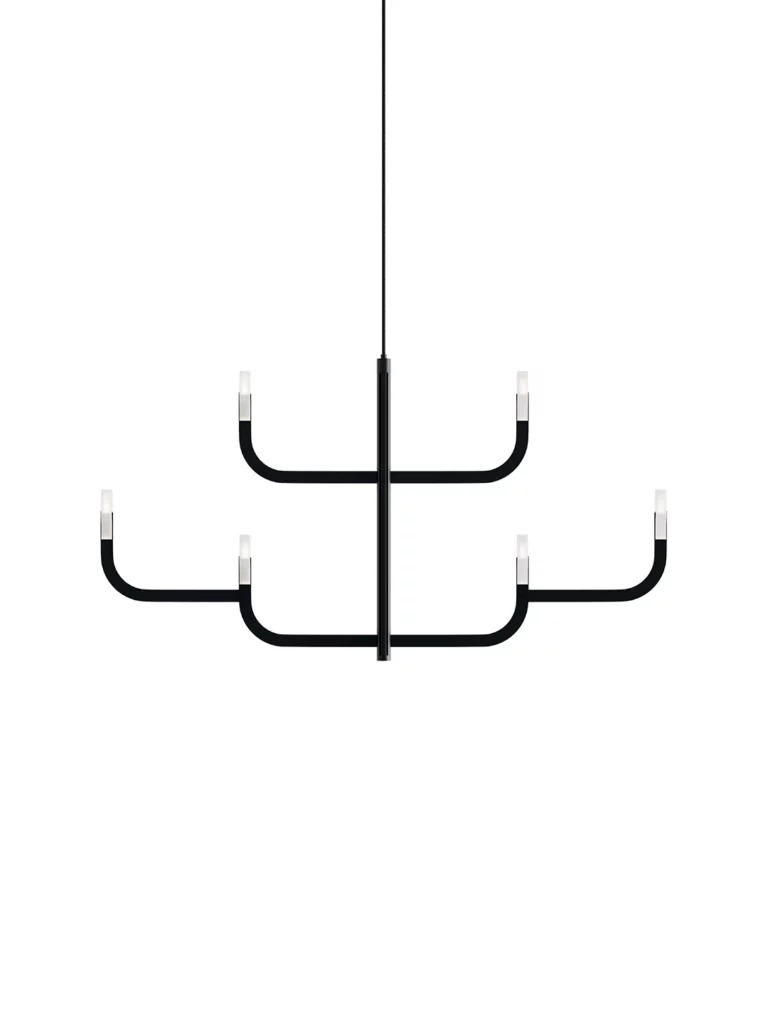
A09-E
J-us E configuration
A09-E
J-us E configuration
Main specifications
| Typology | Suspension | ||
|---|---|---|---|
| Application | Indoor | ||
| Material |
|
||
| Finishes |
|
||
| Dimensions (in) | H body 21.3, cable max 118, D ø 19.3 | ||
| Weight (lb) | 4.52 lbs | ||
| Light Source | LED module 33W, 2700K | ||
| Insulation Class | I |
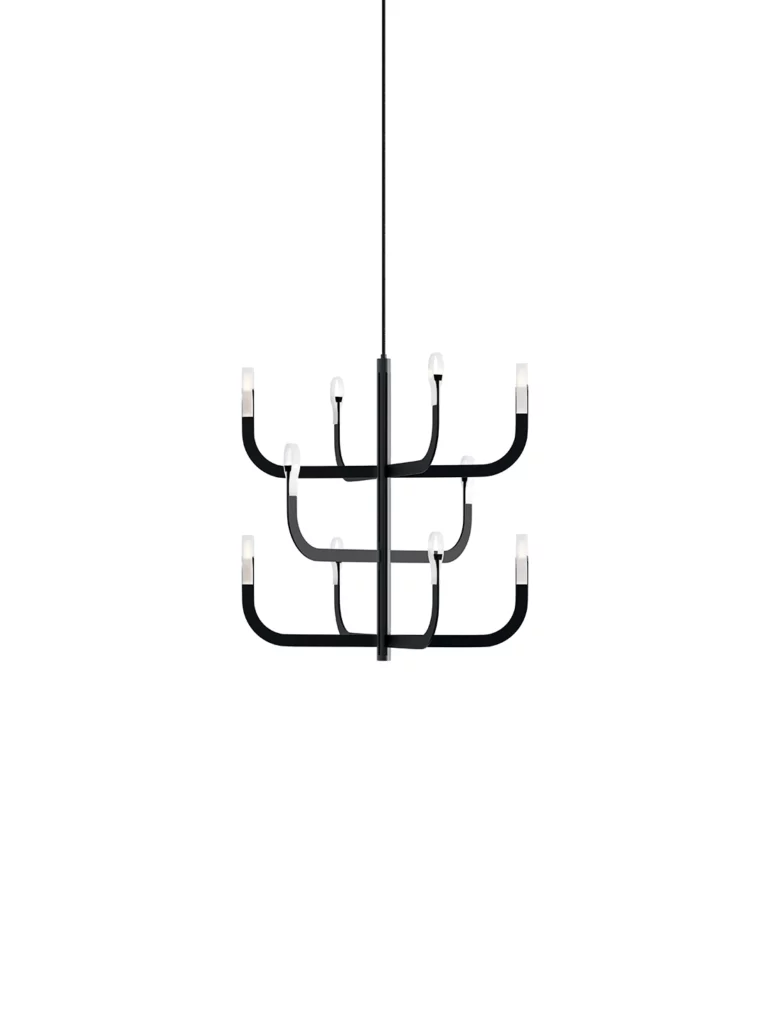
A09-G
J-us G configuration
A09-G
J-us G configuration
Main specifications
| Typology | Suspension | ||
|---|---|---|---|
| Application | Indoor | ||
| Material |
|
||
| Finishes |
|
||
| Dimensions (in) | H body 21.3, cable max 118, D ø 36.2 | ||
| Weight (lb) | 5.93 lbs | ||
| Light Source | LED module 57W, 2700K | ||
| Insulation Class | I |

The central cylindrical structure provides a novel electrified track on which to attach the various arms – single or double – of the chandelier.
The arms are positioned freely by inserting and sliding them into the structure slots. Thanks to this system, the chandelier can be composed in different configurations, according to the needs and preferences of the user.
Discover more about J-us and watch the interview with Alessandro Zambelli
Read the story