KoinèTrack system
designed by Mandalaki Studio
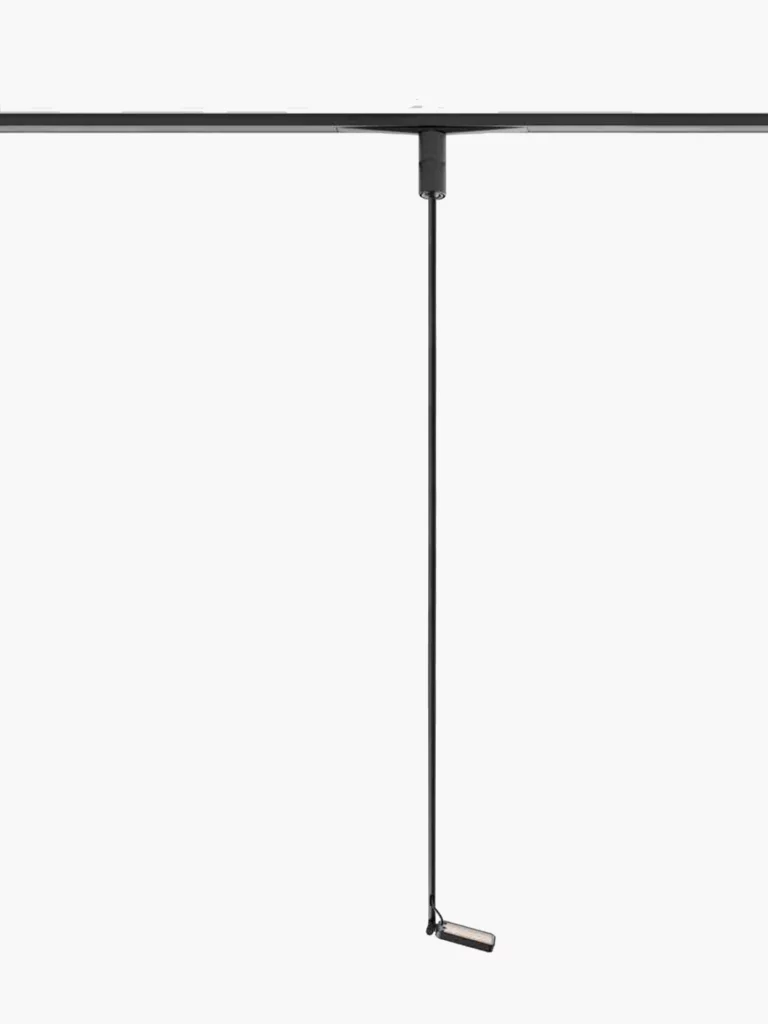
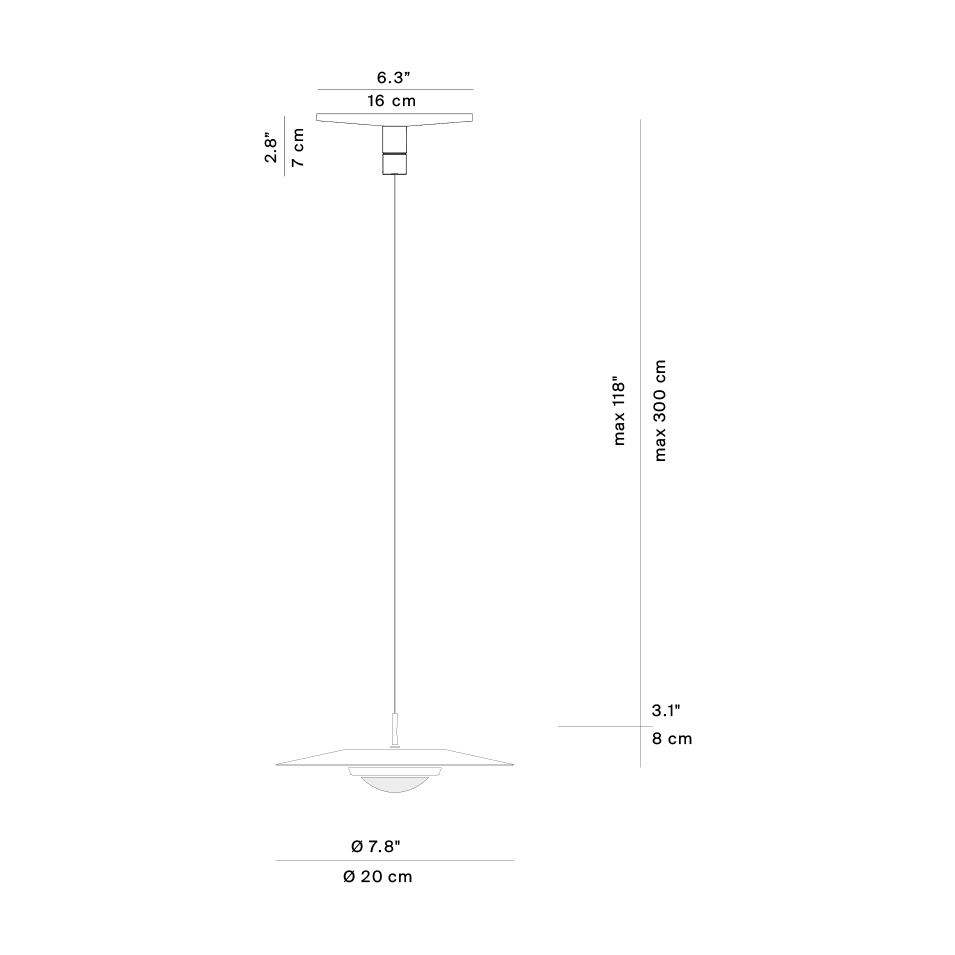
Connected to the slim track by means of a practical adaptor and a simple action, Koinè suspension lamp meets with a new application in a growing number of possible configurations. The compatible model is the suspension version diameter 20cm.
The overall luminous effect of the Koinè project prevents glare, ensuring a high level of visual comfort. The light beam distributed by the lens is homogenous and distinct, a broad cone of light with clearly-defined edges.


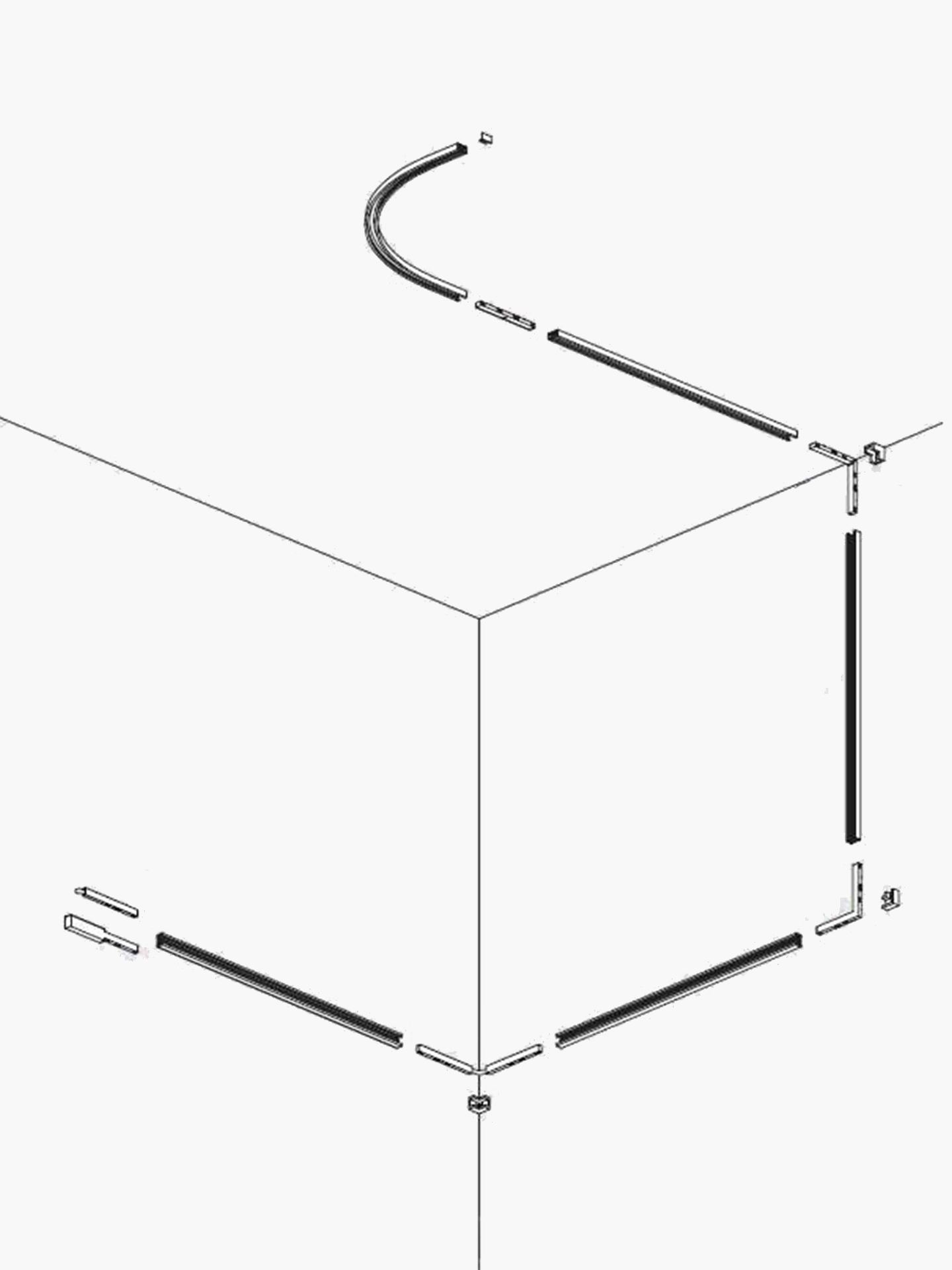
Elegant and essential, with its infinite possibilities and three types – ceiling/wall, built-in and suspension – the new track system is the ideal solution for projects in residential contexts and contract applications.
Discover the track solution and the possible combinations suitable for your projects
Lighting systemsYou might be also interested in