Track system

We could have created the usual cylinder, but we have chosen a track system that makes the difference.
With the new track system, Luceplan explores what is usually a technical aspect, reinterpreting it in a decorative way. Fully in line with the design signature, it is the ideal solution both for residential contexts and for projects in the world of contracting. A versatile system whose elegant, slender lines permit the creation of geometric forms on ceilings and walls, perfect for the personalization of spaces, ready to adapt to different installation requirements
The track lighting has been interpreted by utilizing various collections: Alibel and Flia, designed by Alessandro Zambelli; Koinè, by Mandalaki; and Doi, with design by Meneghello Paolelli.

Alibel Track system,
Designed by Alessandro Zambelli
Doi Track system,
Designed by Meneghello Paolelli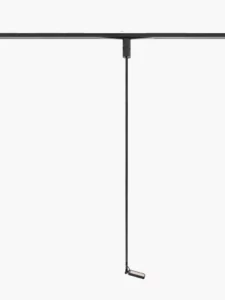
Flia Track system,
Designed by Alessandro Zambelli
Koinè Track system,
Designed by Mandalaki Studio
Infinite possibilities for your projects
Elegant and essential, with its infinite possibilities and three types – ceiling/wall, built-in and suspension – the new Luceplan track system offers an original and versatile interpretation of a lighting classic.
The track is supplied in three different lengths (100, 200 and 300 cm), in a black finish for all the types, and also in white in the ceiling/wall and suspension models.
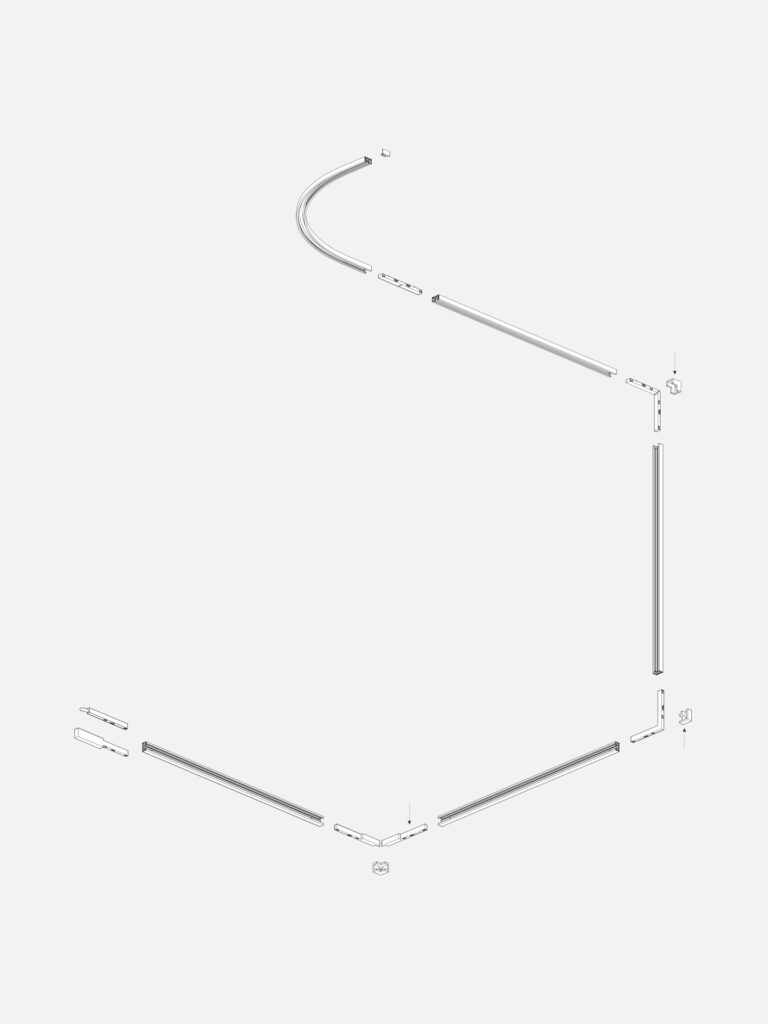
Various accessories are available: starting with the power head that ensures electrification along the track, all the way to the optical fixtures set into its profile. Or the joints and curves (the latter only in the ceiling/wall version), which bring electrical continuity to a sequence of tracks, and all the accessories that permit discreet interconnection, granting aesthetic harmony to the entire system
How to light the space

Apart from the Alibel system of lamps, track lighting has been interpreted by utilizing several of the existing Luceplan collections: Flia by Alessandro Zambelli, Doi by Meneghello Paolelli, Koinè by Mandalaki.
Connected to the slim, discreet track by means of the adaptor and a simple action, the luminous parts take on a new deployment and a larger number of possible configurations, with a distributed glow that changes based on the device utilized.

ALIBEL
Elegant and light in weight, the Alibel lighting system provides two fixtures for track installation (with direct and indirect emission) capable of producing ambient and accent lighting, which can be equipped with a lightweight diffuser with an elliptical form (50 cm).
DOI
Doi is a family of decorative interior lamps that already includes a suspension version and a more compact but still dynamic ceiling/wall version.
The slim cylinder with its elegant finish is the perfect extension of the track. With its accent lighting, the oblong and light shape of Doi emphasises the verticality of the interior that contains it.


FLIA
The Flia family stands out for its ability to combine technological aspects with rigorous expressive forms. The miniaturization of the light source is a key factor of the project.
In the new track system version, Flia is equipped with a practical and flexible adaptor for the directional adjustment of the luminous body.
KOINÈ
Elegance and purity in form characterise the “Koinè” family of pendant lights. The light beam distributed by the mineral lens is homogenous and distinct, a broad cone of light with clearly-defined edges.

Download the brochure and discover the complete collection
DownloadThe Luceplan team offers support for your lighting projects.
Contact us