



KoinèSuspension
designed by Mandalaki Studio
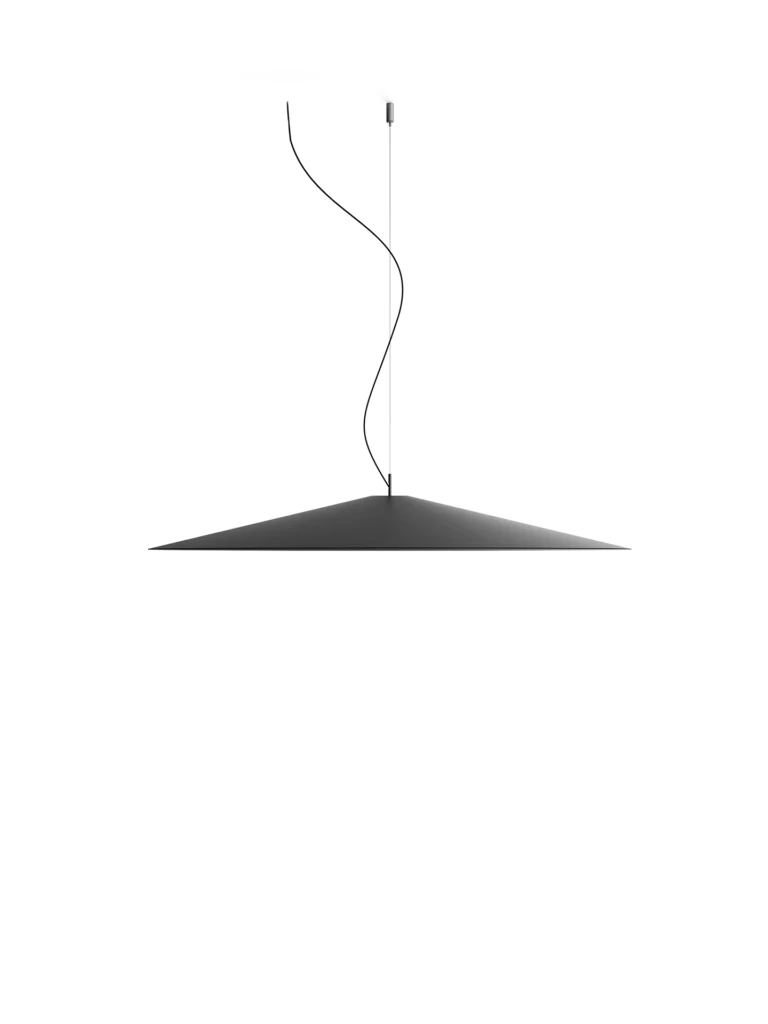
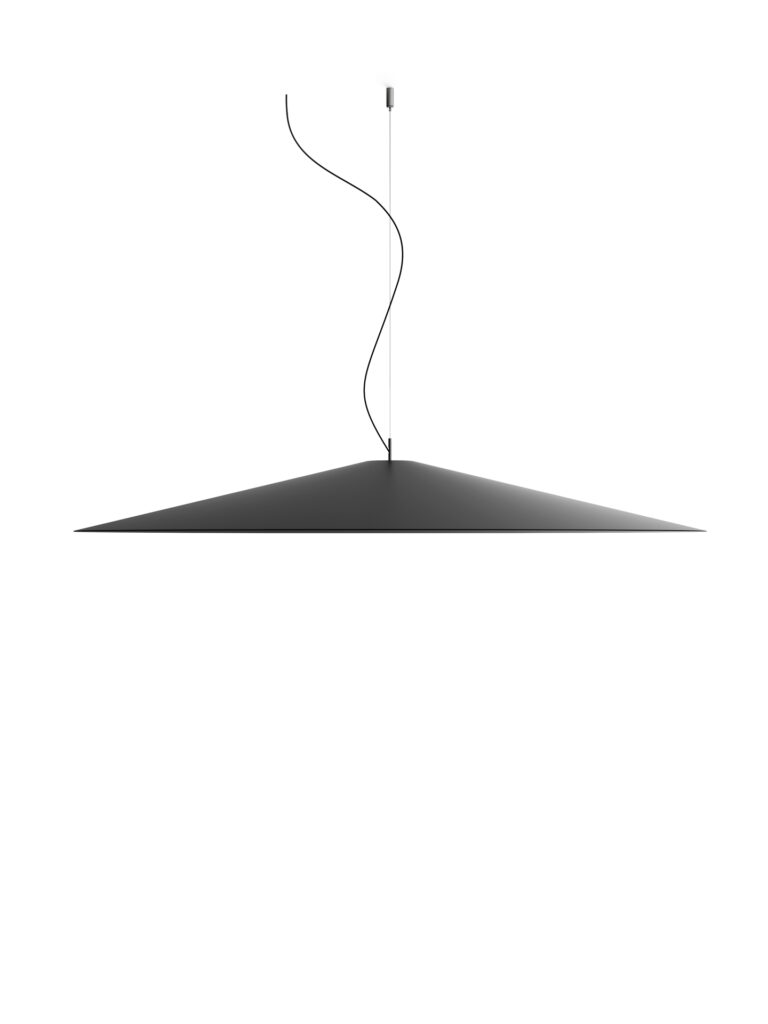
Elegance and purity in form characterise the “Koinè” family of pendant lights, named for its meaning of “shared language” and for its shapes which make it extremely versatile. The light source features a specially designed mineral lens. The light beam distributed by the lens is homogenous and distinct, a broad cone of light with clearly-defined edges



A07S20 A07S20C A07S20W
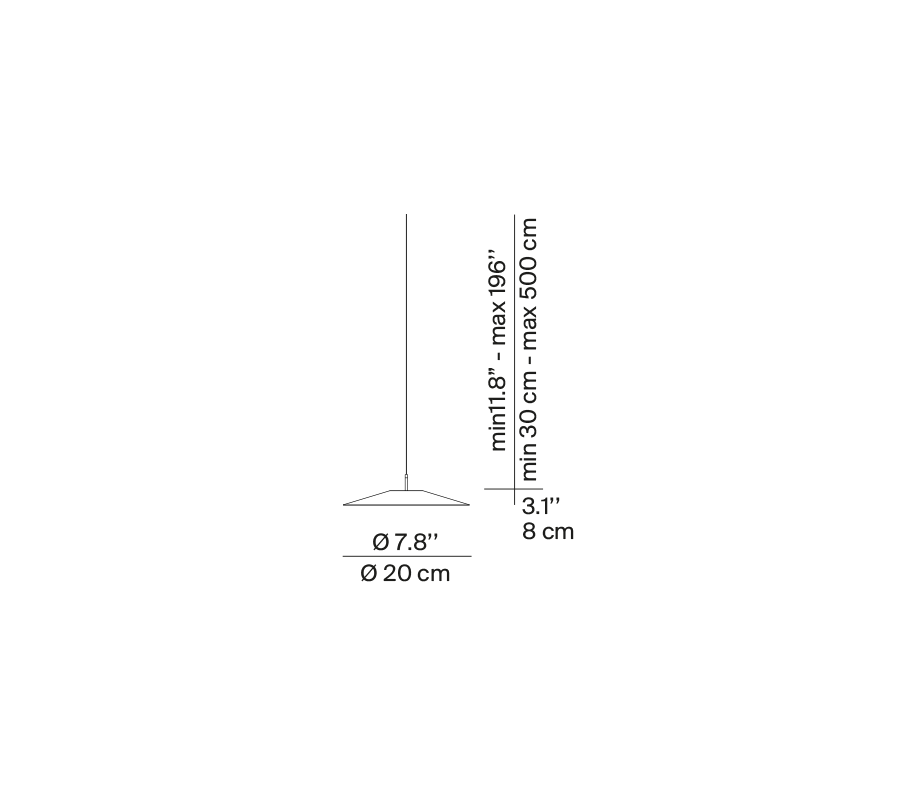
Koinè Ø 7.8″
A07S20 A07S20C A07S20W
Koinè Ø 7.8″
Main specifications
| Typology | Suspension | ||||
|---|---|---|---|---|---|
| Application | Indoor | ||||
| Material |
|
||||
| Finishes |
|
||||
| Dimensions (in) | H 3.1, D 7.87 | ||||
| Weight (lb) | 0.5 lbs | ||||
| Light Source | 15W, LED 12W (only light source – for more details, download datasheet), 3000K, 3500K, 2700K, CRI 90 | ||||
| Insulation Class | III |
A07S37 A07S37C A07S37W
Koinè Ø 14.5″

A07S37 A07S37C A07S37W
Koinè Ø 14.5″
Main specifications
| Typology | Suspension | ||
|---|---|---|---|
| Application | Indoor | ||
| Material |
|
||
| Finishes |
|
||
| Dimensions (in) | H 80, D 370 | ||
| Weight (lb) | 1.1 | ||
| Light Source | 21W (A07/1D) | 22W (A07/1T), LED 19W (only light source – for more details, download datasheet), 21W (A07/1D), 22W (A07/1T), 3000, 3500K, 2700, 90, CRI 90 | ||
| Insulation Class | III |
A07S55C A07S55N A07S55W
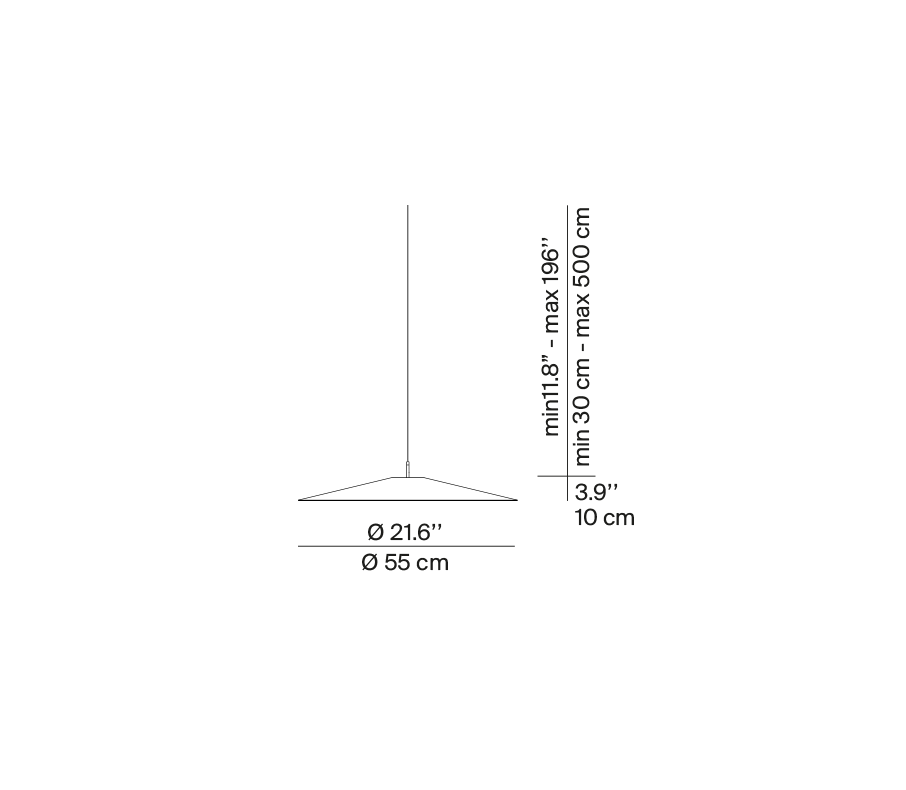
Koinè Ø 21.6″
A07S55C A07S55N A07S55W
Koinè Ø 21.6″
Main specifications
| Typology | Suspension | ||||||
|---|---|---|---|---|---|---|---|
| Application | Indoor | ||||||
| Material |
|
||||||
| Finishes |
|
||||||
| Dimensions (in) | H 100, D 550 | ||||||
| Weight (lb) | 5,5 lbs | ||||||
| Light Source | LED 19W (only light source – for more details, download datasheet), 21W (A07/1D), 22W (A07/1T), 21W (A07/1D) | 22W (A07/1T), 3500K, 3000K, 3000, 2700, CRI 90, 90 | ||||||
| Insulation Class | III |
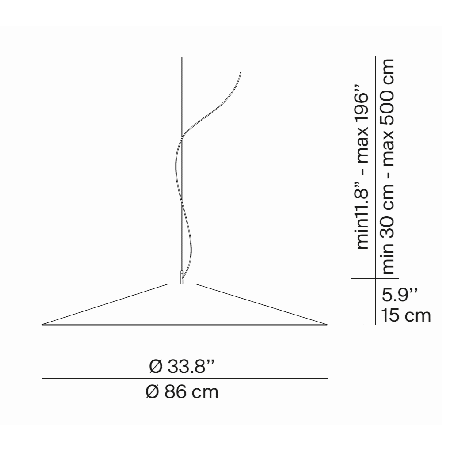
A07S86 A07S86W
Koinè Ø 33.8″
A07S86 A07S86W
Koinè Ø 33.8″
Main specifications
| Typology | Suspension | ||||
|---|---|---|---|---|---|
| Application | Indoor | ||||
| Material |
|
||||
| Finishes |
|
||||
| Dimensions (in) | H 5.9, D 33.8″ Ø | ||||
| Weight (lb) | 4.6bs | ||||
| Light Source | 30W (A07/2D), 31W (A07/2T), 3000K, 2700K, CRI 90 | ||||
| Insulation Class | III |
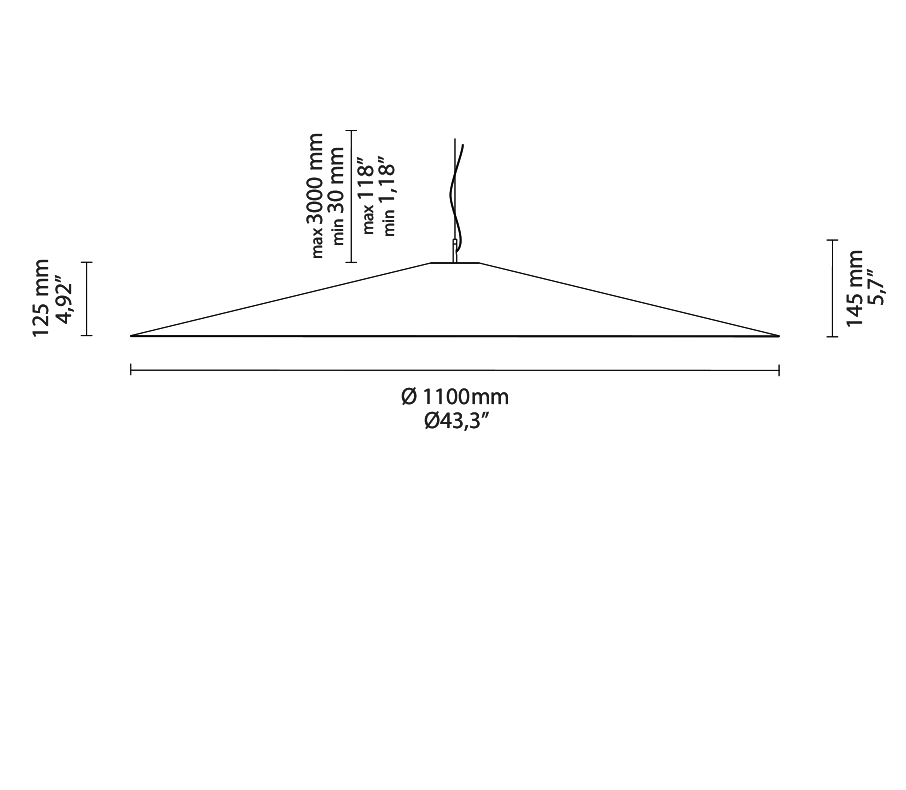
A07S11C A07S11N A07S11W A07S11WN
Koinè Ø 43.3″
A07S11C A07S11N A07S11W A07S11WN
Koinè Ø 43.3″
Main specifications
| Typology | Suspension | ||||
|---|---|---|---|---|---|
| Application | Indoor | ||||
| Material |
|
||||
| Finishes |
|
||||
| Dimensions (in) | H 5.9, D 43.3 | ||||
| Weight (lb) | 6,4 lbs | ||||
| Light Source | LED 26W (only light source – for more details, download datasheet), 3500K, 3000K, 2700K, CRI 90 | ||||
| Insulation Class | III |
Insights

Mandalaki is a product and consulting design firm founded in 2012 by Enrico De Lotto, George Kolliopoulos and Giovanni Senin […]
Read his storyKoiné in ancient Greek means <<common language>>.
For us design means finding a timeless and borderless alphabet, detached from the personal style or taste. Our goal is to provide products that speak to every mankind in the world. We are driven and inspired by performance, ergonomics and functionality, like a beautiful sailing boat that is designed to suit the flow of the water and wind and as a result is beautiful.(…) Our vision is to create a family of products that can cover the widest possible range of environments and configurations, improve people lives and use less energy.
Mandalaki

You might also be interested in

