Conseils RoboDK
Navigation 3D avec la souris
Repères - Système de coordonnées
Raccourcis clavier
Icônes du menu
Simulation et panneau robot
Création d'outils (TCP / CDO)
Exportation de la simulation en HTML 3D ou PDF
Création ou modification de Post Processeurs robot
La documentation de la API de RoboDK est disponible ici. Quelques exemples qui utilisent la API de RoboDK sont disponibles ici.



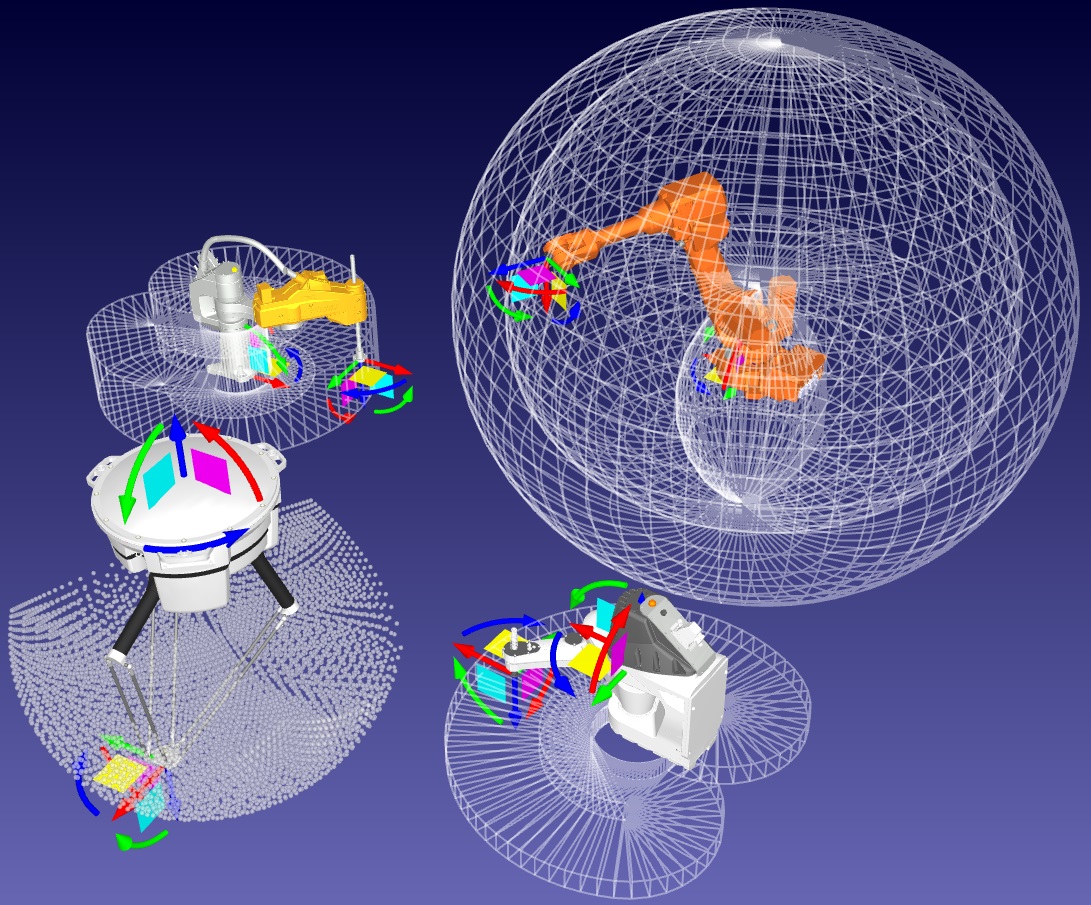
Repères et système de coordonnées
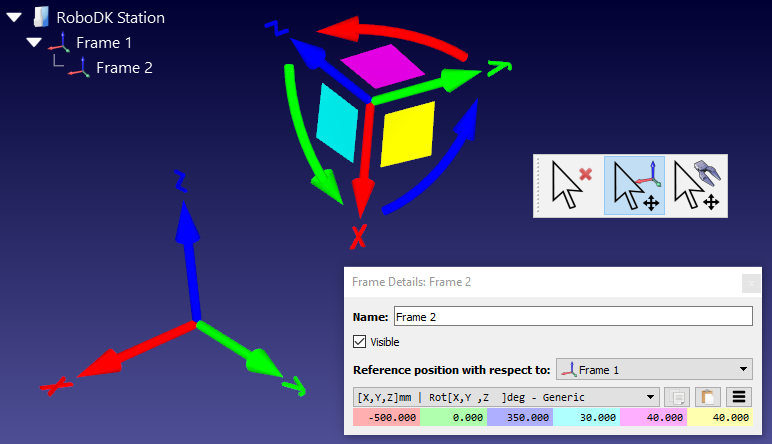
Les systèmes de coordonnées (ou repères) sont très utilisés en robotique pour placer des objets par rapport aux robots. En faisant glisser les objets dans l'arbre de la station RoboDK on peut reconstruire la dépendance réelle des objets par rapport aux systèmes de coordonnées.
Maintenir la touche Alt permet de bouger les repères en les sélectionnant sur l'écran.
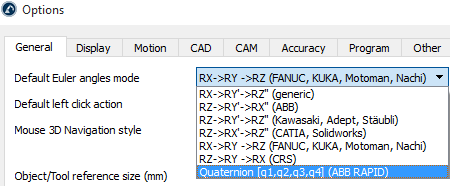
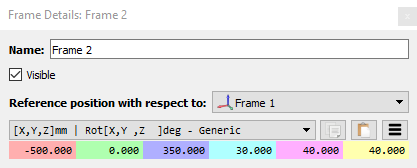
Il est aussi possible d'entrer les valeurs des systèmes de coordonnées en plusieurs formats pour tous les robots, inclus les quaternions et plusieurs formats d'angles d'Euler.
Sélectionner les boutons à droite pour copier ou coller la définition d'un système de coordonnées en utilisant les valeurs ou la pose matricielle.
Angles Euler par défaut
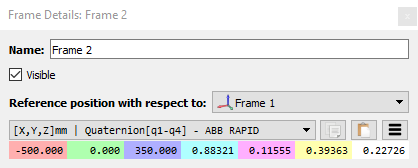
Quaternion
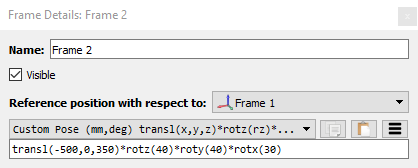
Transformation personalisé
Raccourcis clavier
| Alt |  |
Bouger les systèmes de coordonnées, robots ou des objets |
| Alt+Shift |  |
Modifier un outil (TCP / CDO) |
| Ctrl+0 |  |
Faire entrer tous les objets visibles dans la vue 3D (écran) |
| F1 |  |
Afficher la documentation complète |
| F2 | Renommer un objet | |
| F6 | Générer un programme | |
| F7 | Afficher/masquer un objet | |
| + | Augmenter la taille des systèmes de coordonnées | |
| - | Réduire la taille des systèmes de coordonnées | |
| / | Afficher/masquer le texte | |
| * | Afficher/masquer l'espace de travail des robots | |
| Ctrl + 1 | Ouvrir le dernier fichier utilisé en RoboDK |
Icônes du menu
 |
Ouvrir un fichier. Formats supportés: |
 |
Ouvrir la bibliothèque en ligne |
 |
Suvegarder la station |
 |
Ajouter un système de coordonnées (reference) |
 |
Ajouter une cible robot |
|
Bouger un système de coordonnées |
|
Modifier l'outil (TCP - CDO) |
 |
Activate collision checking. Items in a collision state will be displayed in red. |
 |
Simulation rapide |
 |
Ajouter un programme en Python |
 |
Ajouter un programme robot |
 |
Ajouter un mouvement du type joints |
 |
Ajouter un mouvement linéaire |
 |
Exporter une simulation sous format HTML 3D ou PDF 3D |
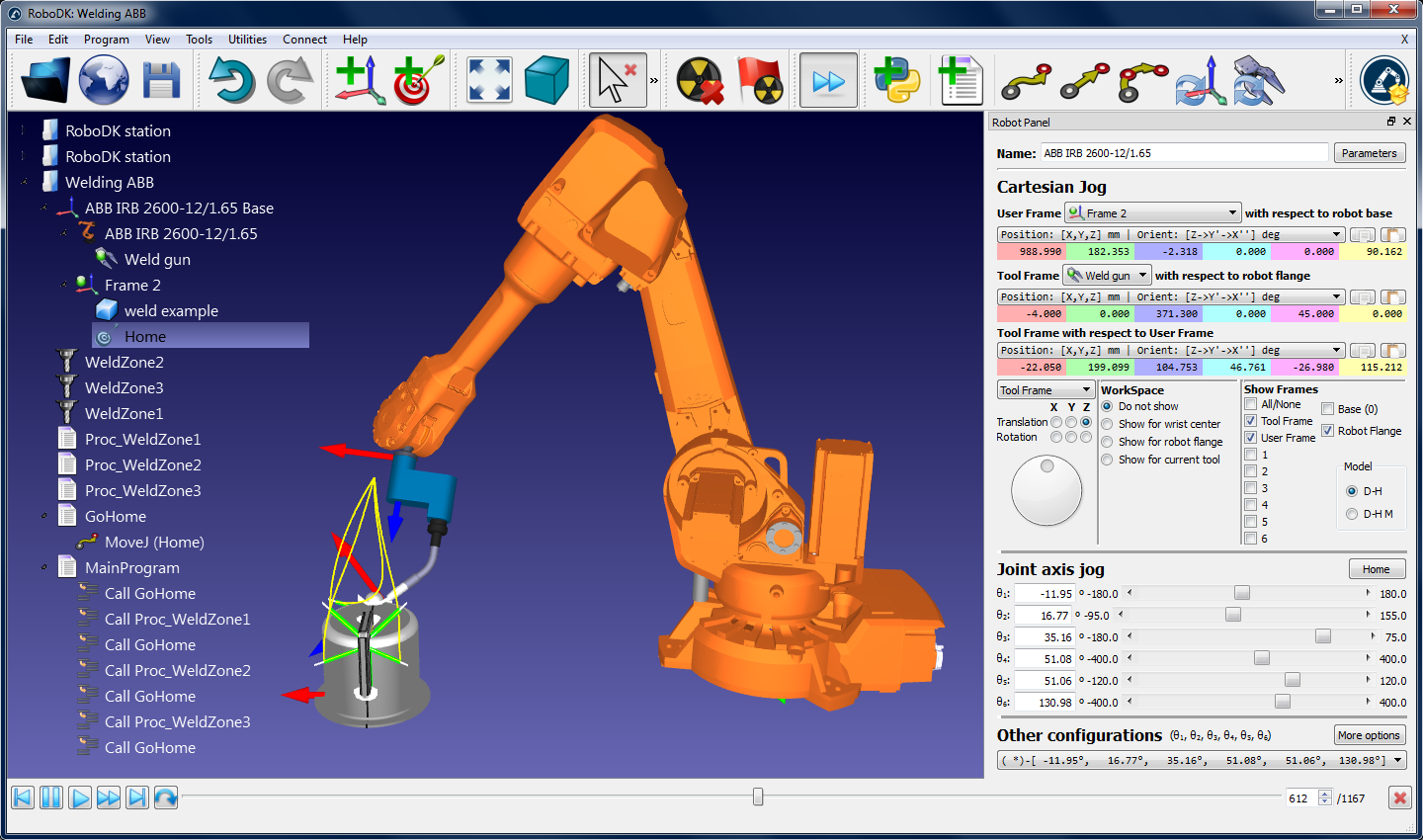
Panneau robot et simulation
Double cliquer un robot pour voir le panneau du robot et pouvoir boger le robot axe par axe ou dans l'espace Cartesien.
Double cliquer un programme pour exécuter la simulation. Double click a program to view the simulation.
Voir la documentation pour la programmation hors-ligne
Création d'un outil robot (TCP ou CDO)
Les outils robot peuvent etre modelisés facilement. Il faut juste faire glisser un objet sur le robot dans l'arbre de la station pour convertir l'objet en outil robot. Il est possible d'importer des objets 3D pour modéliser la cellule. Entre autres, les formats STL, STEP et IGES sont supportés.
Learn more about creating robot tools in the documentation
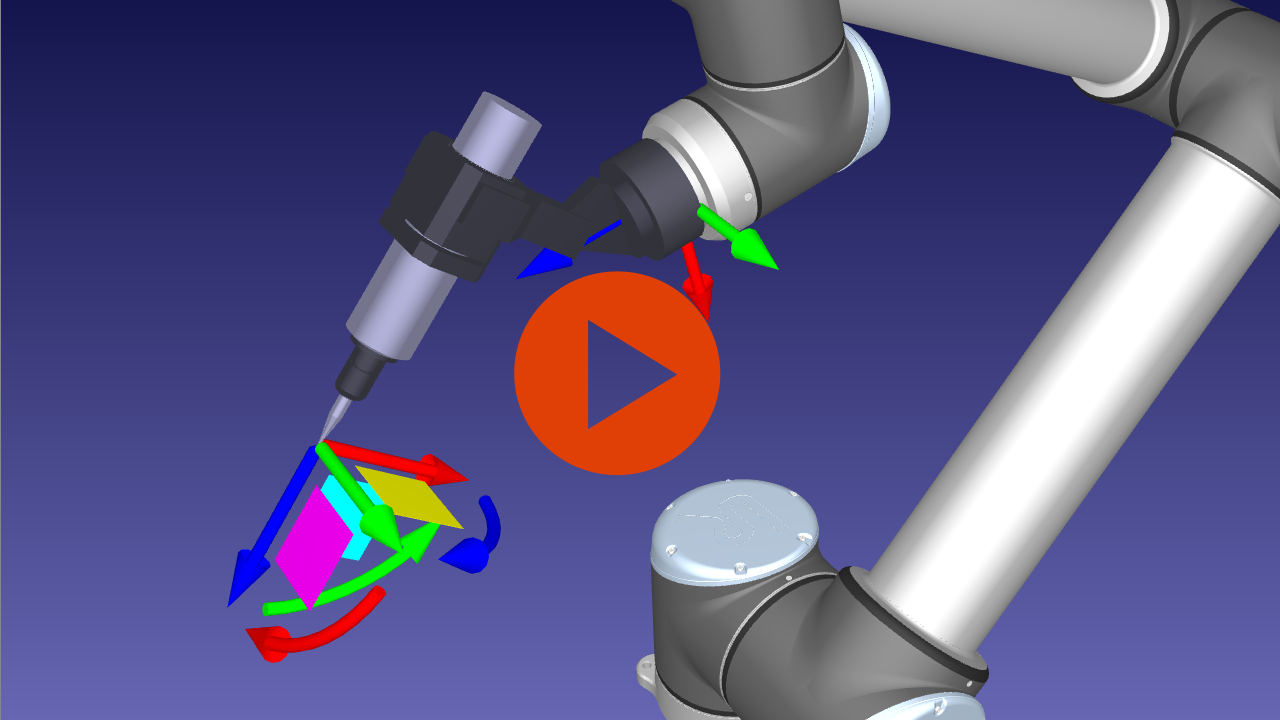
Exporter une simulation en 3D
Une fois une simulation est prête il es possible d'exporter un ficher sous format HTML 3D ou PDF 3D. Ceci permet de partager facilement des nouveaux conceptes ou plans d'une cellule.
Exemple d'une simulation HTML en 3D
Exemple d'une simulation en PDF 3D (les simulations en PDF doivent s'ouvrir avec Acrobat Reader)
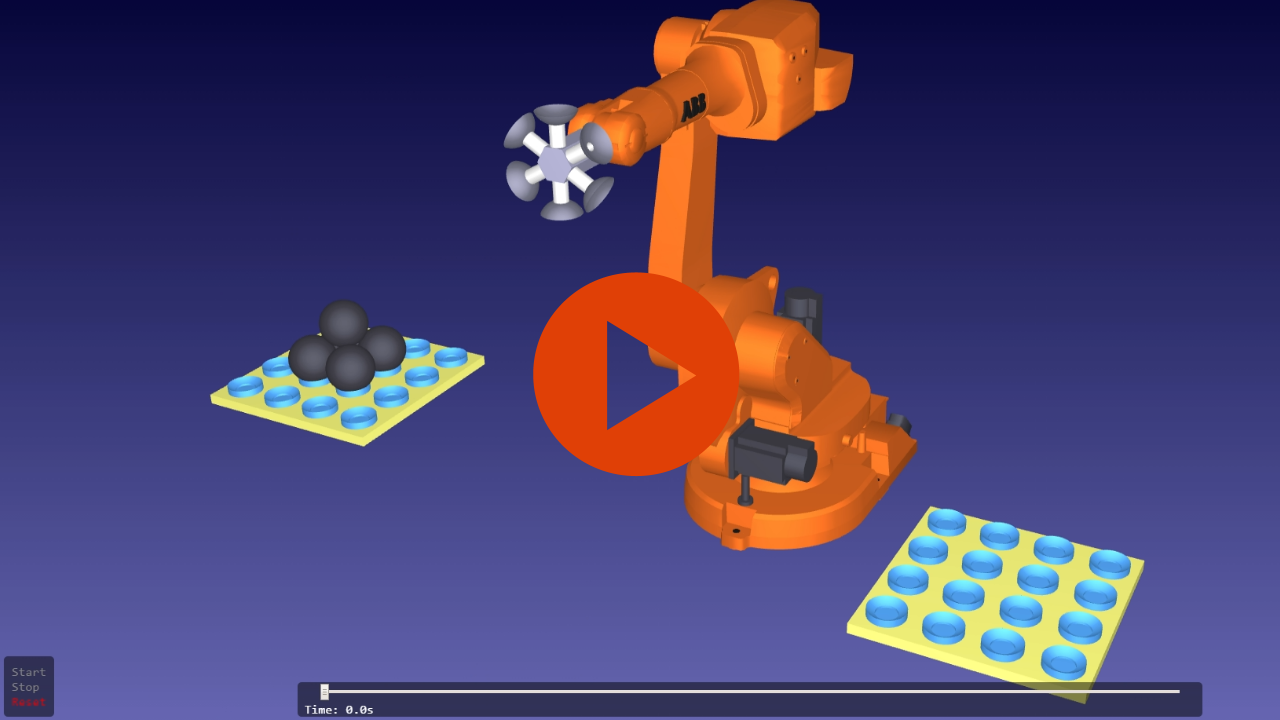
- 0:02 - Selectionner Fichier-Exporter Simulation pour exporter une simulation en un format desiré
- 0:11 - Appuyer sur Démarrer pour commencer a enregistrer une simulation
- 0:28 - Le fichier HTML 3D permet de naviger en 3D et controler le temps de simulation
- 0:55 - Le fichier PDF 3D permet aussi de naviger en 3D et controler le temps de simulation
Création ou modification du post processeurs robot
Le post processeur robot permet de définir comment le programme robot doit être généré. La conversion des mouvements du simulateur au robot se fait avec un Post Processeur. Les post processeurs offrent une flexibilité complète pour générer des programmes avec des besoins spécifiques.
Avec RoboDK vous avez accès aux post processeurs pour la plupart des marques robot.
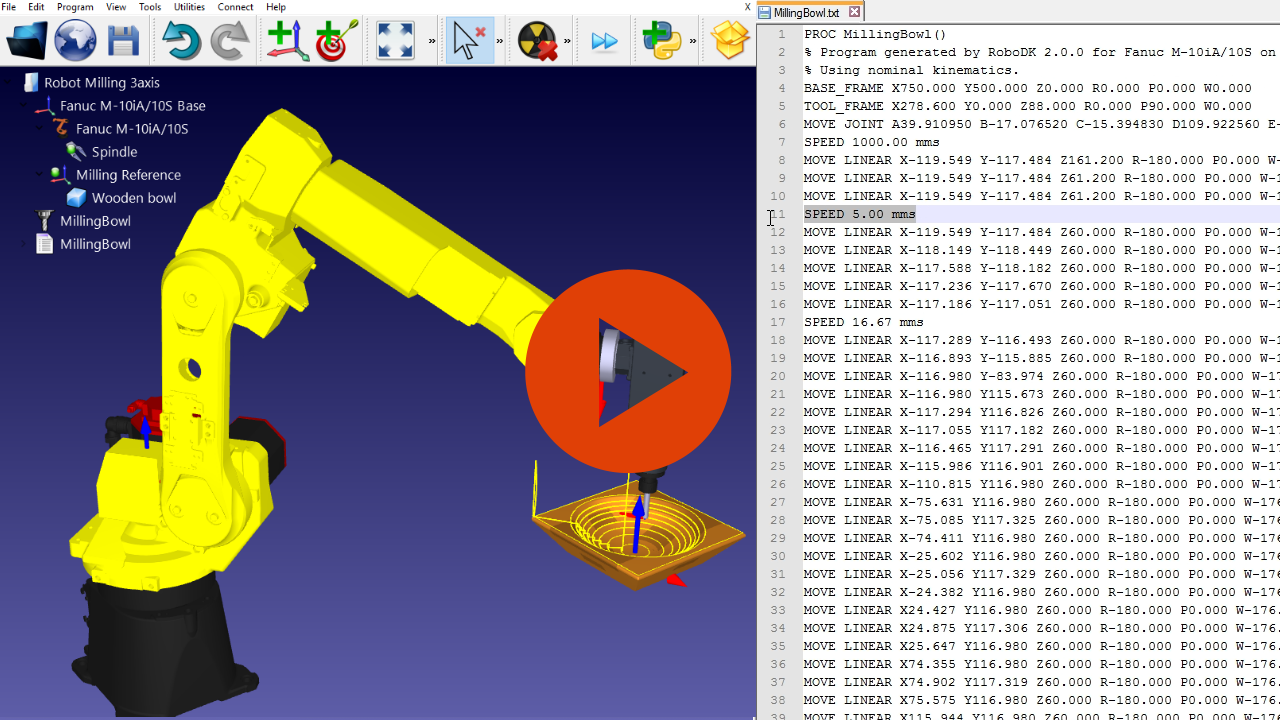
Conseil: Double cliquer un post processeur pour voir le résultat d'un programme exemple.
- 0:17: Une fois la simulation d'un programme est prête, appuyer sur F6 pour générer le programme spécifique au robot
- 0:35: Sélectionner Programme-Ajouter/Modifier post processeur pour personaliser vos post processeurs
- 0:56: Exemple de modification des instructions de mouvement pour obtenir le résultat désiré
- 1:16: Faire click droit sur un programme ou un robot pour séléctionner un post processeur spécifique