Краткое руководство
Функции мыши
Системы координат
Сочетания клавиш
Функции главного меню
Управление роботом и моделирование
Создание инструментов
Экспорт результатов моделирования
Создание или редактирование постпроцессора
Документация по RoboDK API доступна здесь. Некоторые примеры с использованием Python API находятся здесь.
Функции мыши
Выбор |
Перемещение |
Вращение |
Масштаб |
 |
 |
 |
 |
| Левая кнопка выбирает объект удерживайте Ctrl для выбора нескольких объектов |
Удерживайте среднюю кнопку или удерживайте Ctrl+Alt и левую кнопку |
Удерживайте правую кнопку или удерживайте Ctrl+Shift и левую кнопку |
Вращайте колесо прокрутки или удерживайте Shift и левую кнопку |
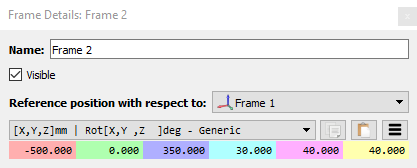
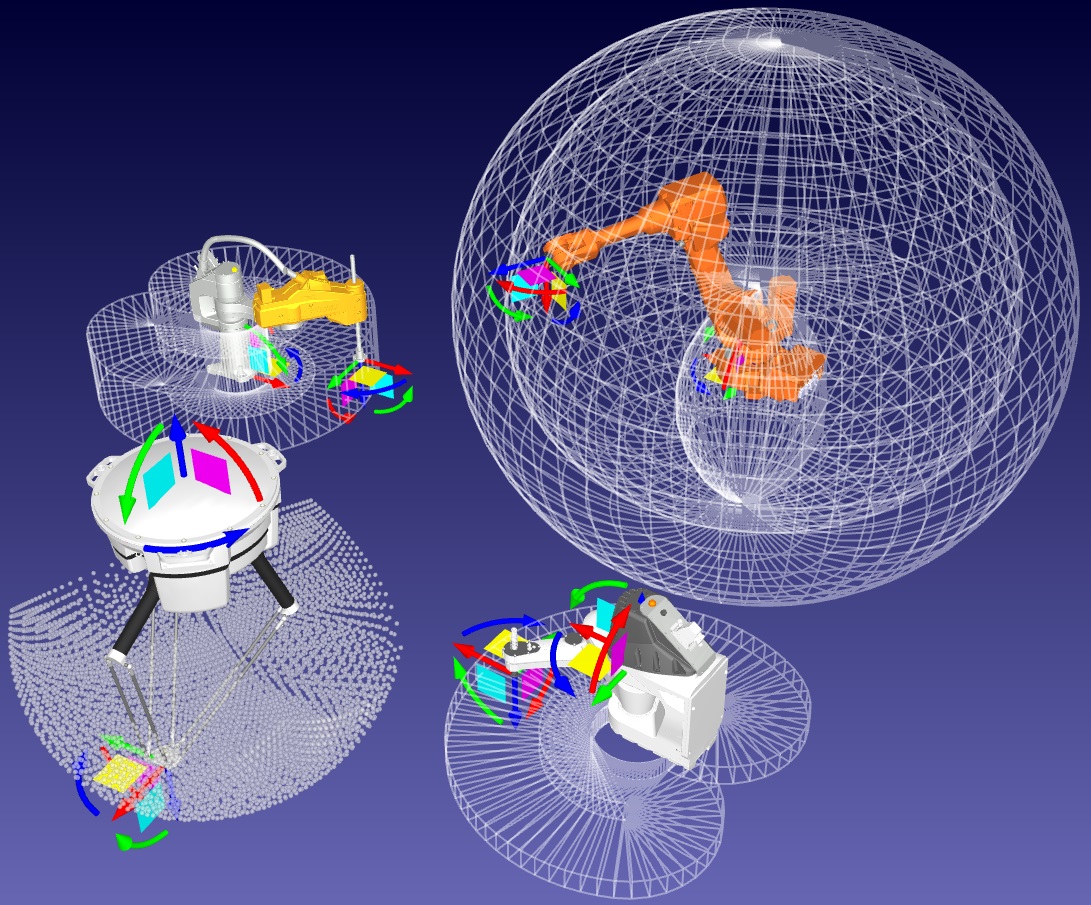
Системы координат
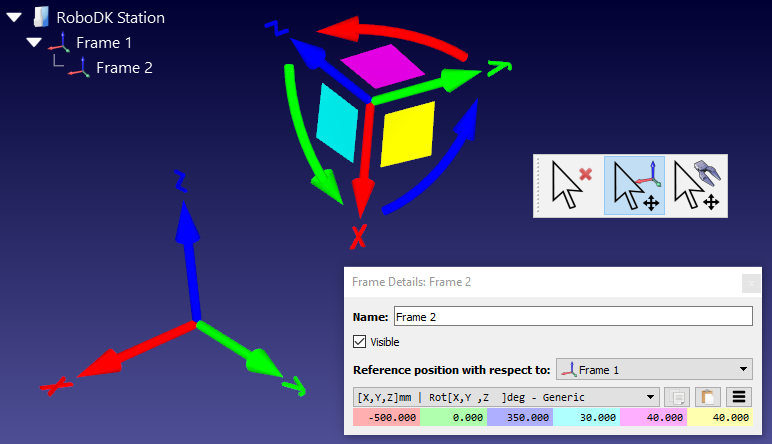
Системы координат позволяют размещать объекты друг относительно друга. Перетаскивание систем координат или объектов внутри дерева проекта создаёт вложенные системы координат.
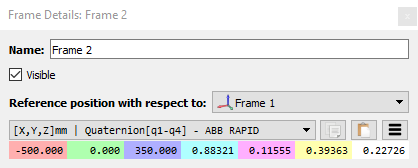
Удерживайте клавишу Alt для перемещения систем координат в пространстве. Также можно вручную ввести значения величины смещения и углов вращения в системе координат любого робота, включая значения кватернионов и углов Эйлера.
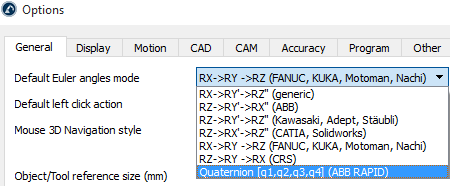
Предпочтительную ориентацию можно выбрать с помощью меню Инструменты-Настройки-Общие-Углы Эйлера по умолчанию.
Кнопки справа нужны для копирования или вставки значений в формате набора чисел или матрицы 4x4.
Углы Эйлера по умолчанию
Кватернионные значения
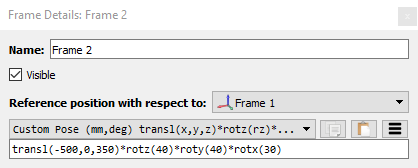
Индивидуальные значения
Сочетания клавиш
| Alt |  |
Перемещение систем координат, роботов и других объектов |
| Alt+Shift |  |
Перемещение инструмента вместе с фланцем робота |
| Ctrl+0 |  |
Масштабировать трёхмерный вид так, чтобы внутри него оказались все выбранные объекты |
| F1 |  |
Отобразить документацию по RoboDK |
| F2 | Переименовать элемент | |
| F6 | Создать программу (или несколько программ) | |
| F7 | Показать или скрыть выделенные объекты | |
| + | Сделать системы координат крупнее | |
| - | Сделать системы координат мельче | |
| / | Показать или скрыть текст | |
| * | Показать или скрыть рабочие зоны роботов | |
| Ctrl + 1 | Загрузить последний файл или проект RoboDK |
Функции главного меню
 |
Открыть файл. Поддерживаемые форматы: |
 |
Открыть каталог роботов |
 |
Сохранить проект |
 |
Добавить систему координат |
 |
Добавить целевую точку |
|
Перемещение систем координат |
|
Перемещение инструментов |
 |
Включить проверку столкновений. При столкновении соответствующие элементы будут подсвечены красным цветом. |
 |
Быстрая симуляция |
 |
Добавить сценарий Python |
 |
Добавить новую программу |
 |
Добавить движение к целевой точке |
 |
Добавить линейное перемещение |
 |
Экспорт результатов моделирования в виде документов 3D HTML или 3D PDF |
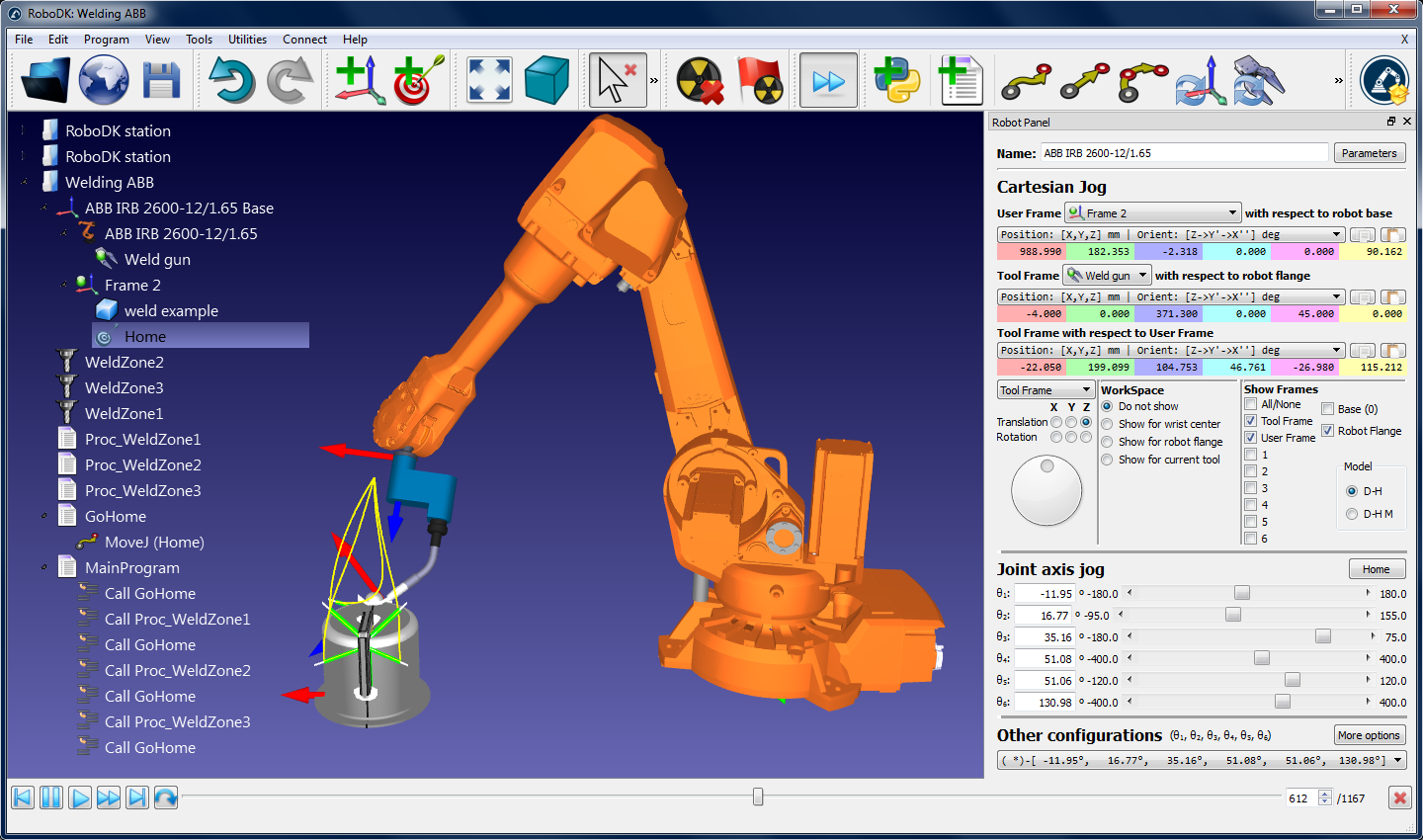
Управление роботом и моделирование
Дважды щёлкните по роботу чтобы открыть панель управления положениями осей и Декартовых координат. Помимо этого, в окне панели управления можно изменять инструмент и рабочую систему координат.
Дважды щёлкните по программе чтобы начать процесс симуляции.
Узнать больше о моделировании и автономном программировании
Создание инструментов
Инструменты для робота создаются путём импортирования трёхмерной модели и перетаскивания её на модель робота. При этом модель автоматически преобразуется в инструмент. RoboDK умеет обрабатывать трёхмерные модели в форматах STL, IGES и STEP.
Узнать больше о создании инструментов
Экспорт результатов моделирования
Результаты моделирования могут быть экспортированы в форматах 3D HTML или 3D PDF. Данная возможность позволяет легко делиться своими результатами с другими людьми.
Пример документа в формате 3D HTML
Пример документа в формате 3D PDF (документы 3D PDF нужно открывать в программе Acrobat Reader, а не в браузере)
Совет: результаты в формате HTML больше, чем в формате PDF, поэтому имеет смысл сжимать их для уменьшения размера. Результаты в формате HTML полностью самодостаточны, не требуют каких-либо зависимостей и могут быть переданы другим людям как один большой файл.
- 0:02 Выбор Файл-Экспорт симуляции для выгрузки проекта в желаемом формате
- 0:11 Нажата кнопка Старт для начала записи симуляции
- 0:28 Результаты в формате 3D HTML позволяют просматривать проект и управлять воспроизведением симуляции
- 0:55 Результаты в формате 3D PDF так же предоставляют возможности просмотра проекта и управления воспроизведением
Создание или редактирование постпроцессора
Постпроцессор осуществляет преобразование движений внутри моделирующей среды RoboDK в инструкции системы управления конкретного робота. Разные постпроцессоры реализуют отличные друг от друга способы создания управляющих программ.
RoboDK предлагает набор постпроцессоров для большинства моделей роботов, при этом постпроцессор представляет собой программу на языке Python, которая определяет способ автоматического создания управляющей программы. Постпроцессор для того или иного производителя роботов может быть модифицирован с целью оптимизации и большего соответствия задачам технологического процесса.
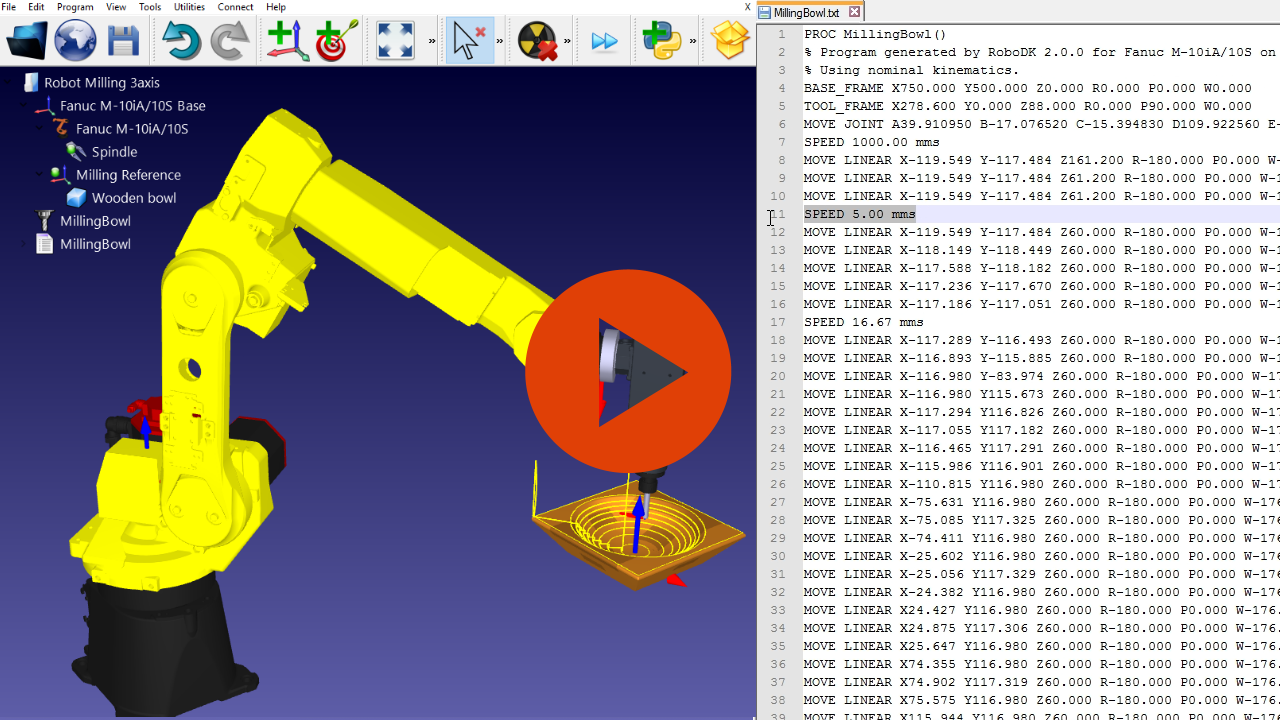
Совет: дважды нажмите на постпроцессор, чтобы открыть предварительный просмотр управляющей программы.
- 0:17 Нажатие F6 для создания управляющей программы
- 0:35 Выбор постпроцессора через меню Программа-Добавить/изменить постпроцессор
- 0:56 Редактирование команд движений для получения желаемых результатов
- 1:16 Установка постпроцессора путём нажатия правой кнопкой мыши по программе и выбора соответствующего пункта меню