Exemples RoboDK
Cette section montre quelques exemples d'utilisation de RoboDK pour la simulation et la programmation hors-ligne. Ces exemples sont disponibles avec l'installation par défaut dans la section Télécharger.
Sélectionner Fichier-Ouvrir pour voir un exemple specific.
Manipulation Pick and place
La manipulation par Pick and place automatisé permet d'accelerer le transfert de pieces d'un endroit a un autre. Ceci permet d'augmenter la capacité de production.
Cette vidéo tutoriel montre comment utiliser RoboDK pour la simulation et programmation hors-ligne de façon générique.
Usinage robotisé
L'usinage robotisé permet d'utiliser un robot comme une machine-outil pour faire l'usinage. Un bras robot peut se comporter comme une machine outil à 5 axes. Le logiciel RoboDK permet de convertir les programmes d'usinage (typiquement faits avec un logiciel FAO comme un fichier NC, G-code ou API) à des programmes robot.
Générez des programmes robot sans singularités et sans erreurs facilement avec RoboDK.
Documentation usinage robotisé
Usinage robotisé avec axes externes
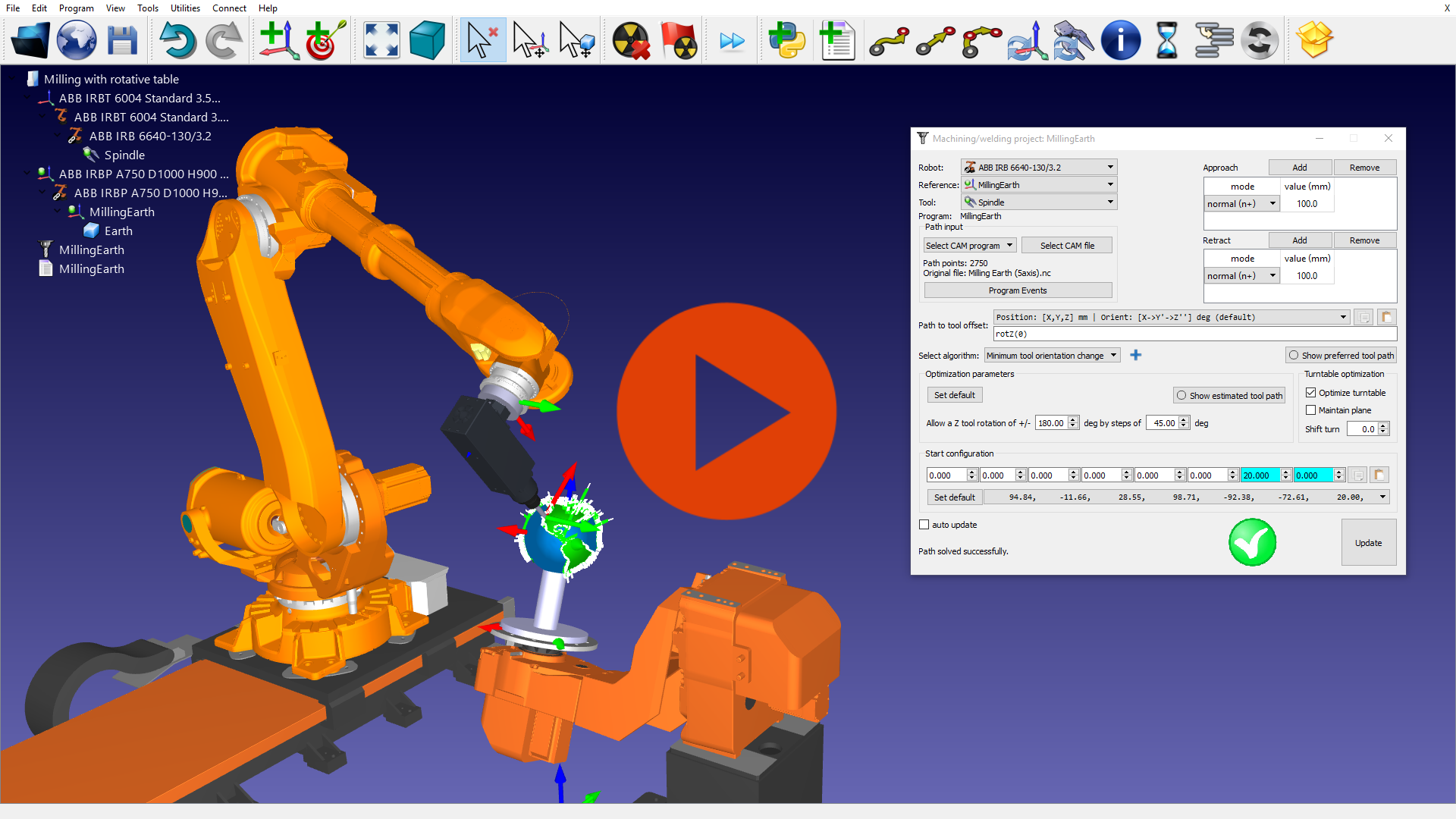
Modélisez vos axes externes dans les simulations RoboDK pour l'usinage robotisé. RoboDK optimise les axes du robot et les axes externes pour generer des programmes sans erreurs et éviter les singularités automatiquement.
Cette vidéo montre un robot ABB avec une table tournante en train d'usiner un objet sphérique.
Voir simulation d'usinage robotisé
Documentation usinage robotisé
Peinture robotisé
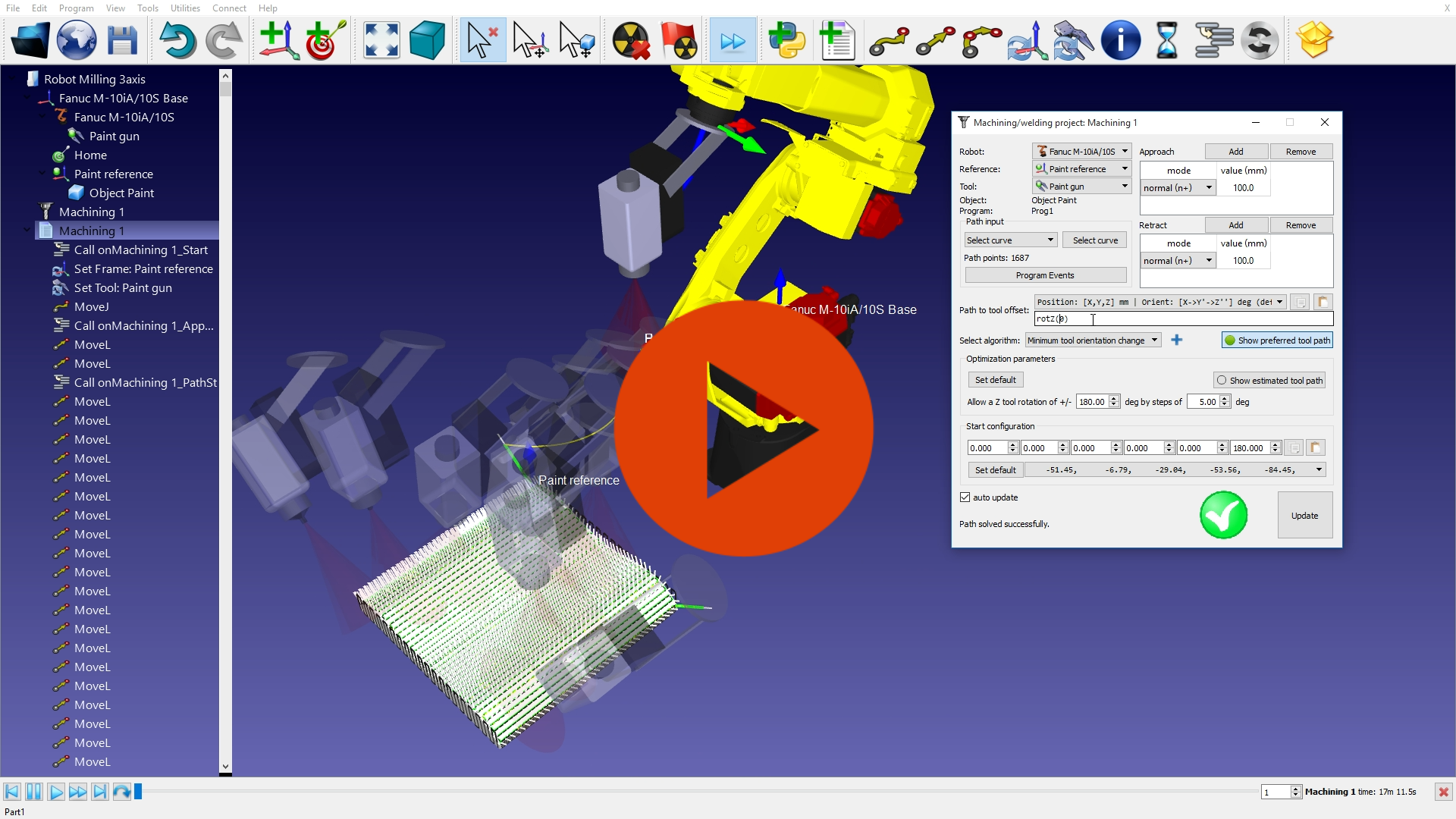
RoboDK permet de facilement générer des parcours sur des surfaces pour la peinture ou l'inspection. RoboDK permet d'éviter les singularités, gérer les limites des axes et les collisions pour générer des programmes robot sans érreurs.
Générer des parcours sur des surfaces complexes et obtenez des programmes robot en quelques minutes.
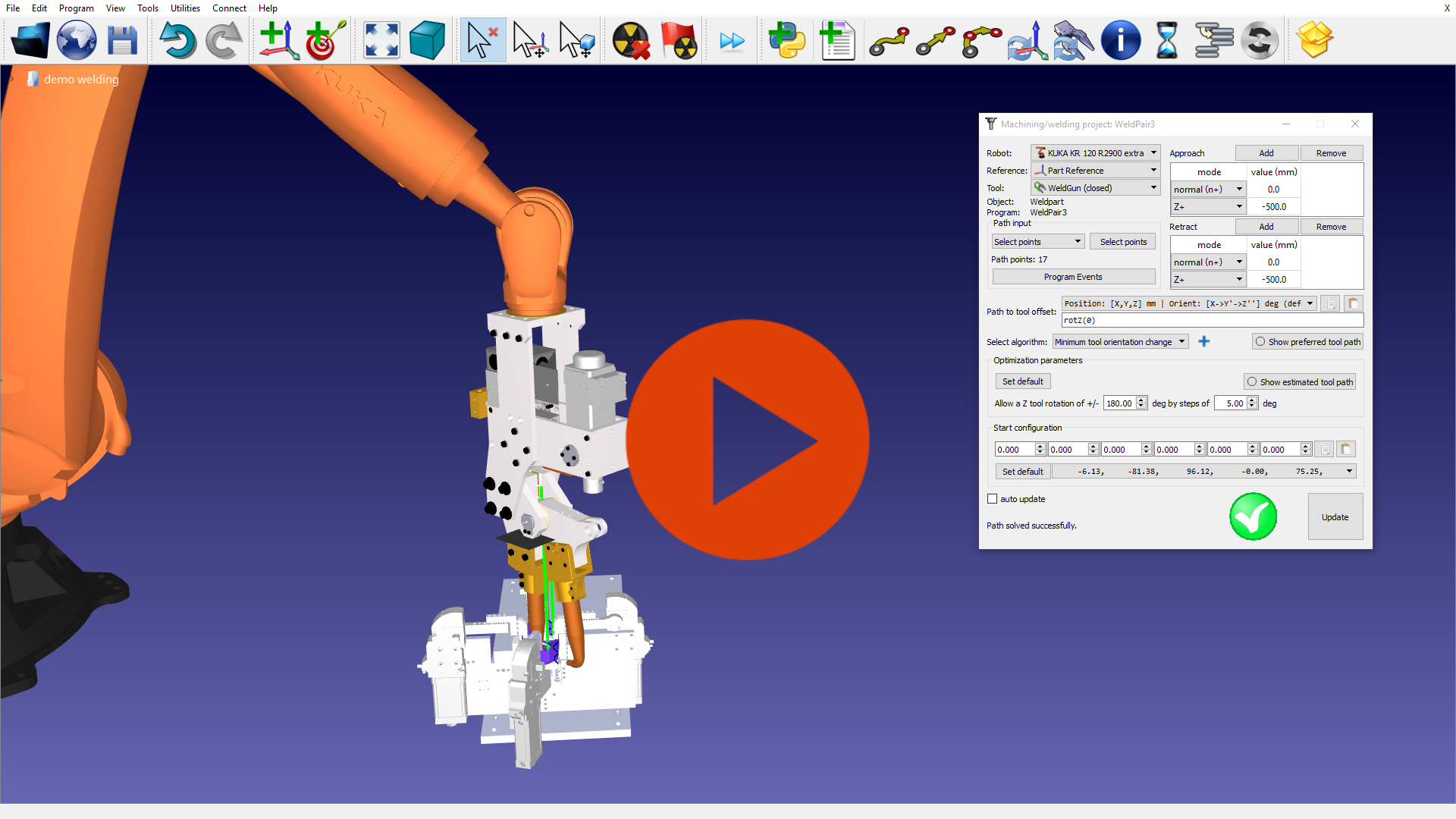
Soudage par points robotisé
Le soudage par points robotisé est un type de soudage électrique par résistance très connu en robotique. RoboDK peut générer des programmes robot pour le soudage automatisé. Le logiciel RoboDK permet d'éviter les erreurs et les singularités facilement.
Cette vidéo montre une application de soudage par points avec un robot KUKA et une torche HMD Technology.
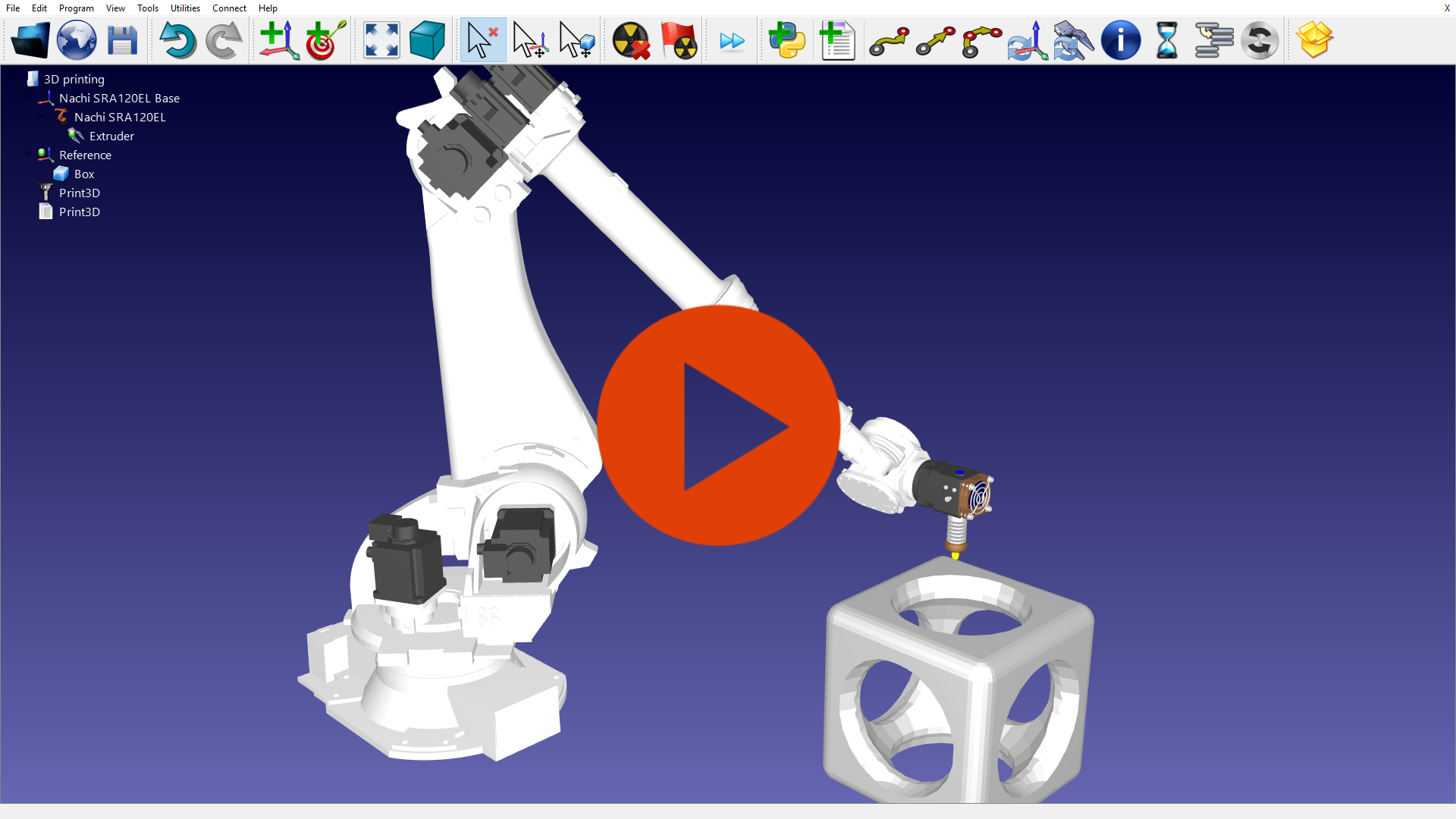
Impression 3D avec robots
L'impression 3D est un procédé de fabrication de pièces en volume par ajout ou agglomération de matière. Avec RoboDK c'est possible d'utiliser les bras robots comme une de imprimante 3 axes ou 5 axes. Ceci permet d'imprimer des pièces de grand format. RoboDK permet de générer des programmes spécifiques au robot et éviter les erreurs des programmes automatiquement.
Cette vidéo montre comment utiliser un robot Nachi pour faire l'impression 3D d'un objet.
Convoyeur à courroie
Des nouveaux mécanismes peuvent être modélisés dans RoboDK pour les simuler (convoyeurs à courroie, axes linéaires, axes rotatifs, ...).
Cet exemple montre deux robots UR qui déplacent des pièces sur un convoyeur à courroie.
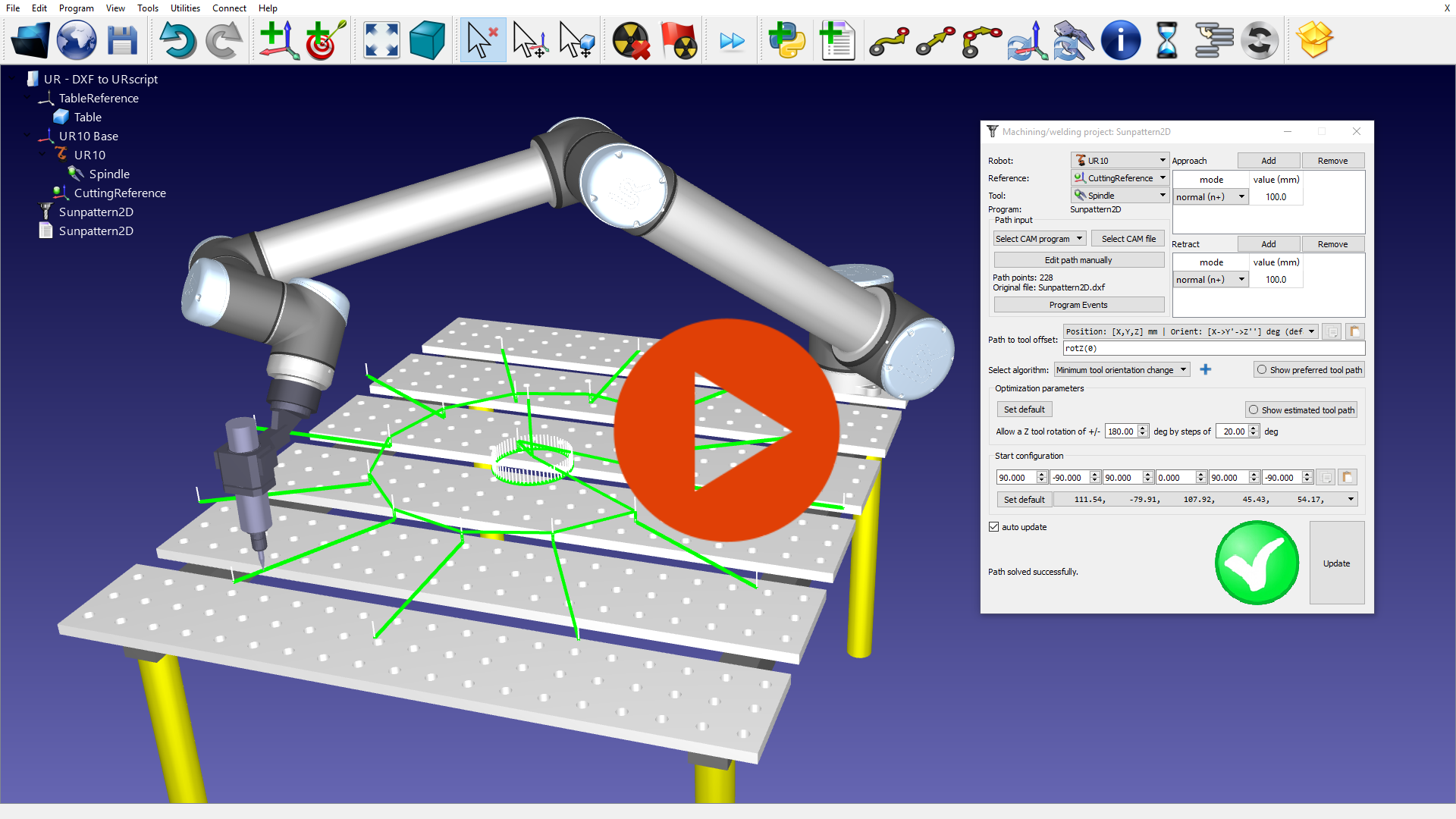
Conversion de DXF à programmes robot
Les robots peuvent être utilisés pour suivre des dessins DXF. RoboDK permet de simuler et de faire la programmation hors-ligne de façon rapide et facile.
Des dessins DXF peuvent être convertis à des programmes NC (G-code) pour la fabrication automatisée. Cet exemple montre comment convertir un fichier DXF à un programme robot pour un robot Universal Robot (fichier SCRIPT ou URP).
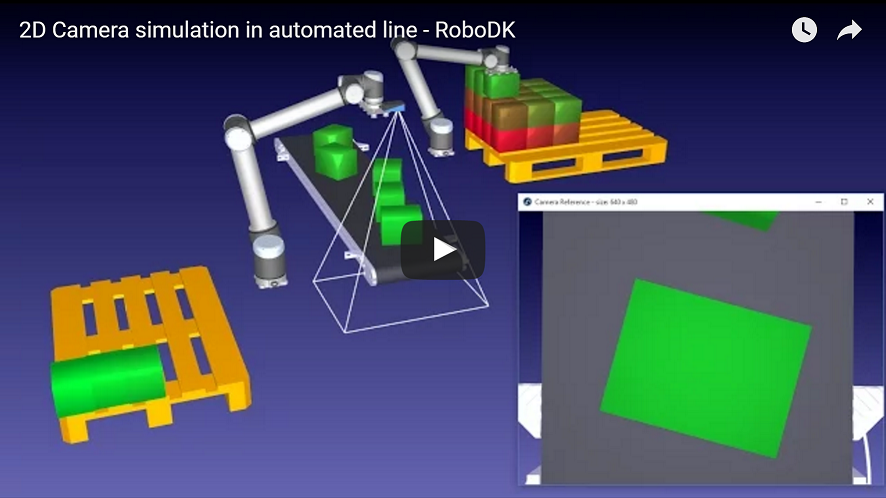
Inspection automatisée
L'inspection automatisée, aussi connue comme vision par ordinateur, permet d'indentifier la position et l'état des objets automatiquement. RoboDK permet de simuler des caméras d'inspection et reagir en fonction des images capturés dans l'environnement virtuel. Plusieurs paramètres de la caméra peuvent être simulés, comme la distance focale, distance de travail, champ de vue ou la taille du capteur.
Cet exemple montre deux robots Universal Robots et une caméra d'inspection 2D dans une application de palletization.
Pick and place avec Python
Cet exemple consiste en une application de type pick and place en utilisant la API de RoboDK avec Python.
La API de RoboDK permet de simuler et programmer des robots avec Python. La API permet aussi d'automatiser des tâches spécifiques pour la simulation et évaluer plusieurs scénarios.
Information sur la API de RoboDK
Dessins robotisés
Un robot peut faire des dessins sur papier pareil qu'un artiste!
C'est possible d'automatiser la conversion d'images ou du texte à des programmes robot en utilisant la API de RoboDK. Une librairie spécifique peut être utilisée avec la API de RoboDK sur Python pour convertir des images SVG à des programmes robot.