RoboDKのヒント
3Dマウスナビゲーション
参照系
キーボードショートカット
メニューアイコン
ロボット操作とシミュレーション
ロボットツール(TCP)の作成
3DHTMLまたはPDFでシミュレーションをエクスポート
ロボットポストプロセッサーを作成または編集
RoboDK APIの資料は、こちらから入手できます。 Python APIを使用するいくつかの例は こちらにあります。
3Dマウスナビゲーション
選択 |
パン |
回転 |
ズーム |
 |
 |
 |
 |
| 左クリック Ctrlキーを押しながら複数のオブジェクトを選択 |
中央ボタンを押し続ける または CtrlとAltキーを押しながら選択 |
右クリックを押し続ける または CtrlとShiftキーを押しながら選択 |
マウスホイールを動かす または Shiftキーを押しながら選択 |
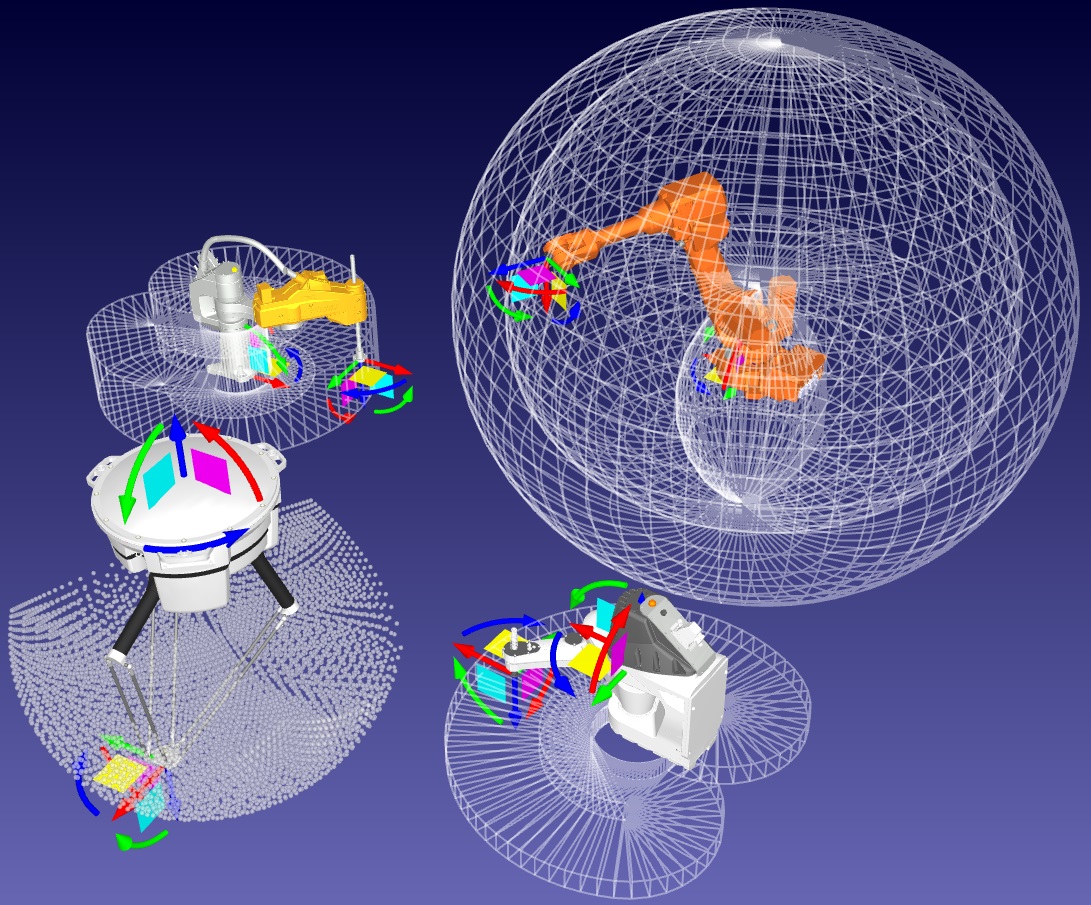
参照系(座標系)
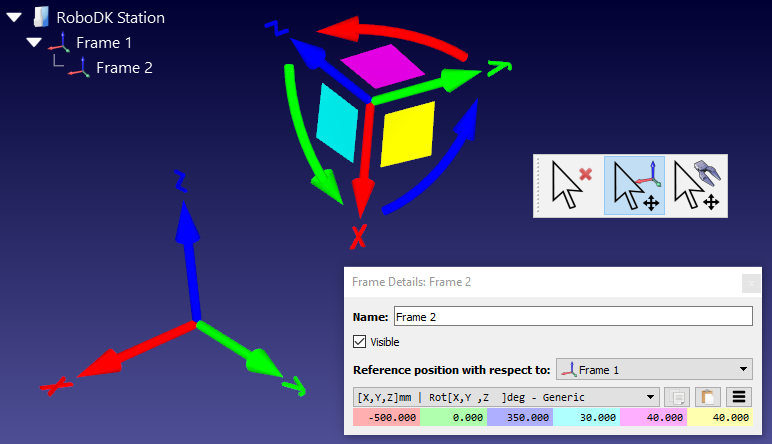
参照系を使用すると、オブジェクトを互いに対して配置できます。プロジェクトツリー内の参照系またはオブジェクトをドラッグアンドドロップして、ネストされた参照系も作成できます。
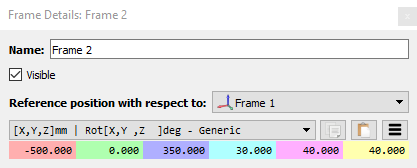
Altキーを押したまま、3Dビューで参照系を選択して動かします。任意のロボットに、固有の四元数の値やオイラー回転などの、さまざまなタイプの並進および回転の値を手動で入力することもできます。
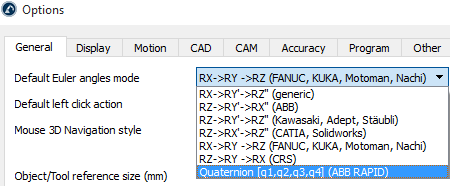
メニューで使用したいオイラー方向を選択してください: ツール-設定-一般-デフォルトのオイラー角モード.
右側のボタンを選択して、配列または4x4ポーズとして値をコピー/貼り付けたりできます。
デフォルトのオイラー角
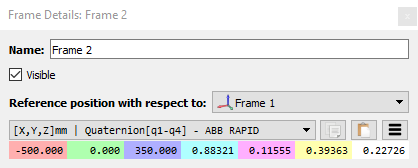
四元数の値
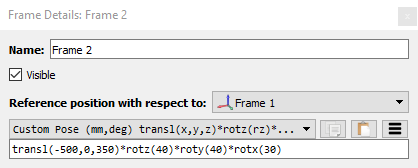
カスタムの並進と回転
キーボードショートカット
| Alt |  |
参照系、ロボット、その他のオブジェクトを移動 |
| Alt+Shift |  |
ロボットTCP(tools)の移動 |
| Ctrl+0 |  |
3Dビューを選択したオブジェクトに合わせる |
| F1 |  |
RoboDKドキュメンテーションを表示 |
| F2 | アイテム名を変更 | |
| F6 | プログラムを生成 | |
| F7 | 選択されたオブジェクトを表示/非表示 | |
| + | 参照系/座標系を拡大 | |
| - | 参照系/座標系を縮小 | |
| / | テキストを表示/非表示 | |
| * | ロボットの作業スペースを表示/非表示 | |
| Ctrl + 1 | 最後のファイルまたはRoboDKプロジェクトを読み込む |
メニューのアイコン
 |
コンピューターからファイルを読み込みます。サポートされているフォーマット: |
 |
オンラインライブラリーを開く |
 |
プロジェクトを保存 |
 |
参照系を追加 |
 |
ロボットターゲットを追加 |
|
参照系を移動 |
|
ロボットTCP(ツール)を移動 |
 |
衝突チェックを有効化。衝突状態のアイテムは赤で表示されるようになります。 |
 |
高速シミュレーション |
 |
Pythonスクリプト(マクロ)を追加 |
 |
新しいロボットプログラムを追加 |
 |
関節移動を追加 |
 |
直線移動を追加 |
 |
シミュレーションを3D HTMLまたは3D PDFドキュメントとしてエクスポート |
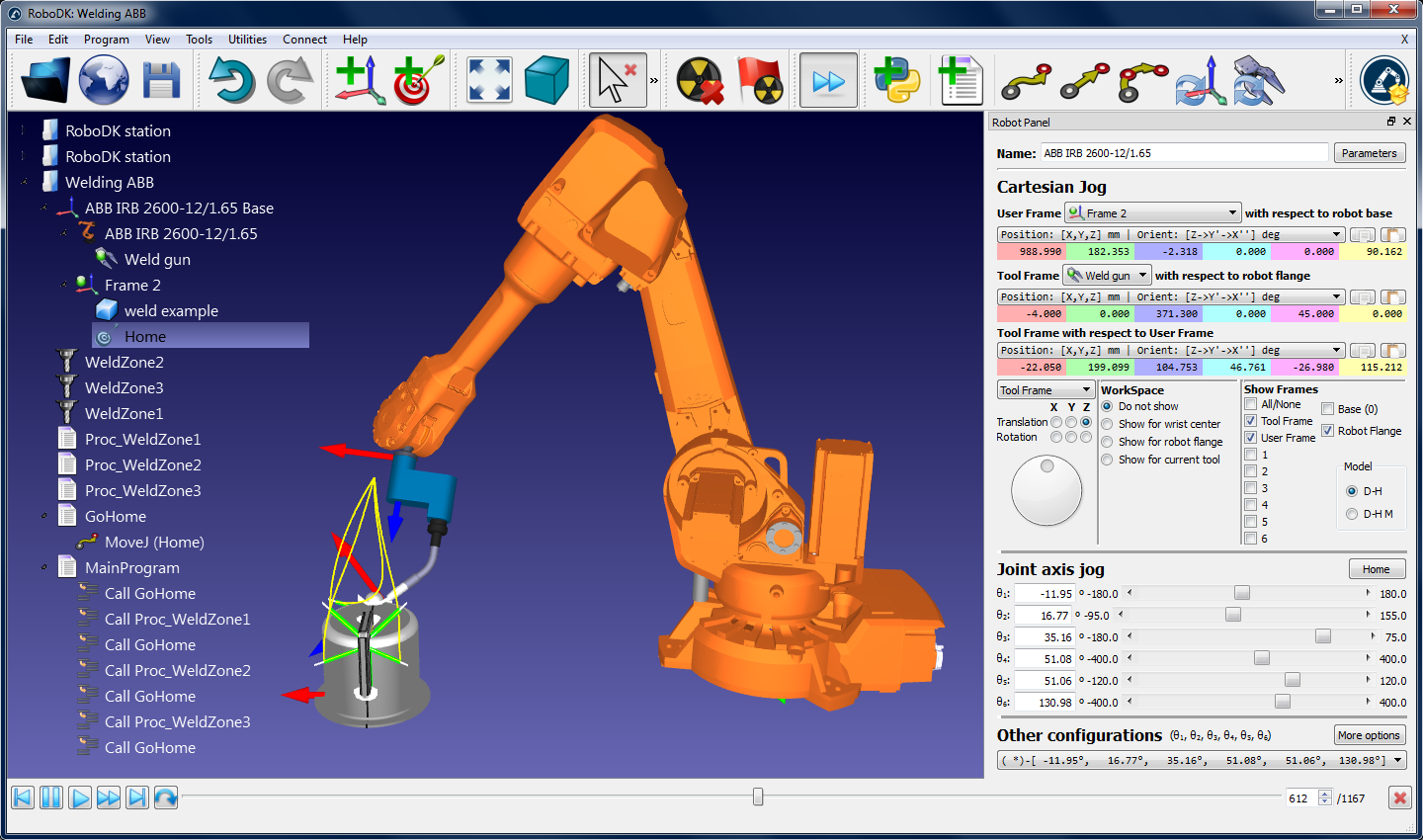
ロボット操作とシミュレーション
ロボットをダブルクリックしてロボットパネルを開き、ロボット軸をデカルト空間でジョグ操作できます。 ロボットツール(TCP)とロボットの参照系も、このウィンドウで変更できます。
プログラムをダブルクリックしてシミュレーションを表示させます。
ドキュメンテーションでシミュレーションとオフラインプログラミングの詳細を知る
ロボットツール(TCP)を作成
ロボットツールは、3Dオブジェクトをインポートしてロボットにドラッグアンドドロップするだけで簡単に作成できます。そのオブジェクトは自動的にツールに変換されます。 3Dオブジェクトをインポートしてセルをモデリングします。使用できる3Dファイル形式は、STL、IGES、およびSTEPファイルです。
シミュレーションを3Dファイル形式でエクスポート
シミュレーションの準備ができたら、3D HTMLシミュレーションまたは3D PDFとしてエクスポートできます。この機能により、レイアウトとシミュレーションのコンセプトを簡単に共有できます。
3D PDFシミュレーションドキュメントの実例 (3D PDFシミュレーションは、ブラウザではなく、Acrobat Readerで開く必要があります)
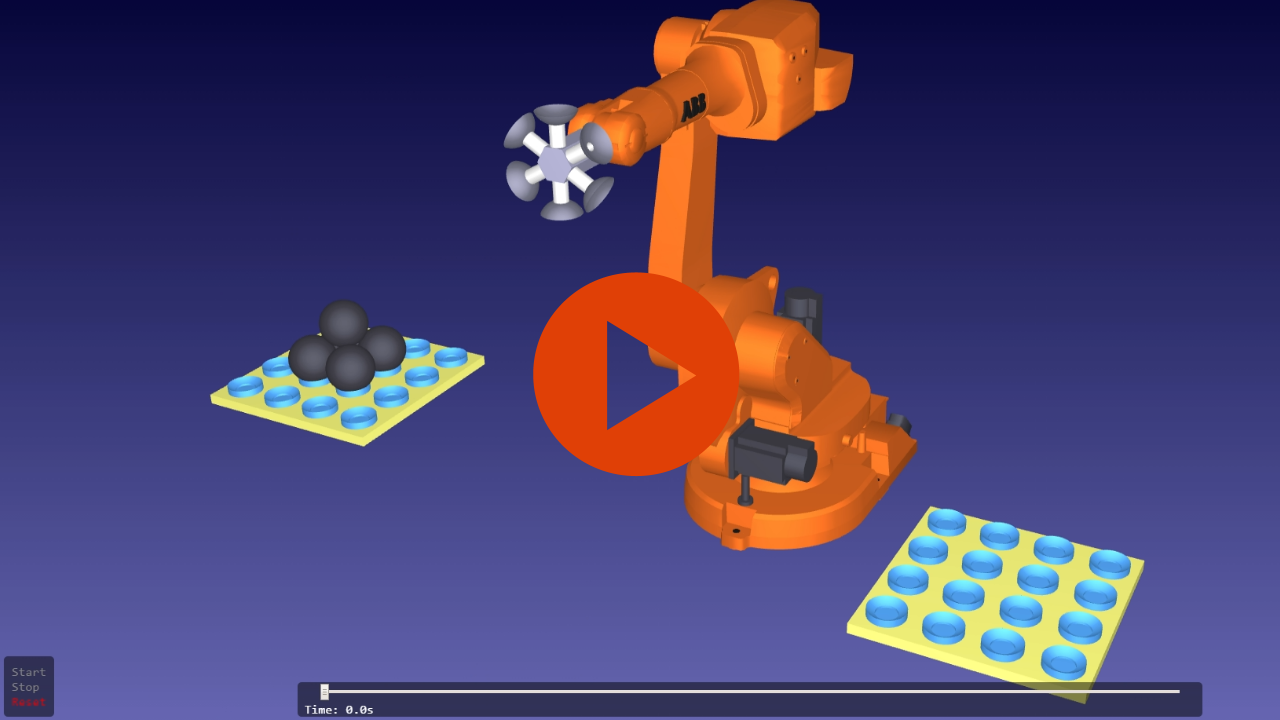
ヒント: HTMLシミュレーションはPDFシミュレーションよりも大きく、それらを圧縮するとサイズが大幅に縮小されます。HTMLシミュレーションには依存関係がなく、1つのファイルとして共有できます。
- 0:02 [ファイル]-[シミュレーションをエクスポート]を選択して、希望の形式でエクスポートします
- 0:11 開始ボタンはシミュレーションの録画を開始します
- 0:28 3D HTMLシミュレーションは、3Dでナビゲートしてシミュレーション時間が操作できます
- 0:55 3D PDFシミュレーションでも、3Dでナビゲートしてシミュレーション時間が操作できます
ロボットポストプロセッサーを作成または編集
ロボットのポストプロセッサーは、プログラムの生成方法を定義します。シミュレータの動きから特定のロボット指示への変換は、ポストプロセッサーによって行われます。ポストプロセッサーは、特定の要件に合わせてロボットプログラムを生成するための完全な柔軟性を提供します。
RoboDKは、ほとんどのロボットブランド用にポストプロセッサーを提供しています。ポストプロセッサーは簡単に作成または編集できます。RoboDKのポストプロセッサーは、コードの生成方法を定義する単なるPythonファイルです。 各ロボットブランドはデフォルトのポストプロセッサーを使用しており、それらを変更してプログラムの生成をカスタマイズし、特定のアプリケーションに合わせて調整できます。
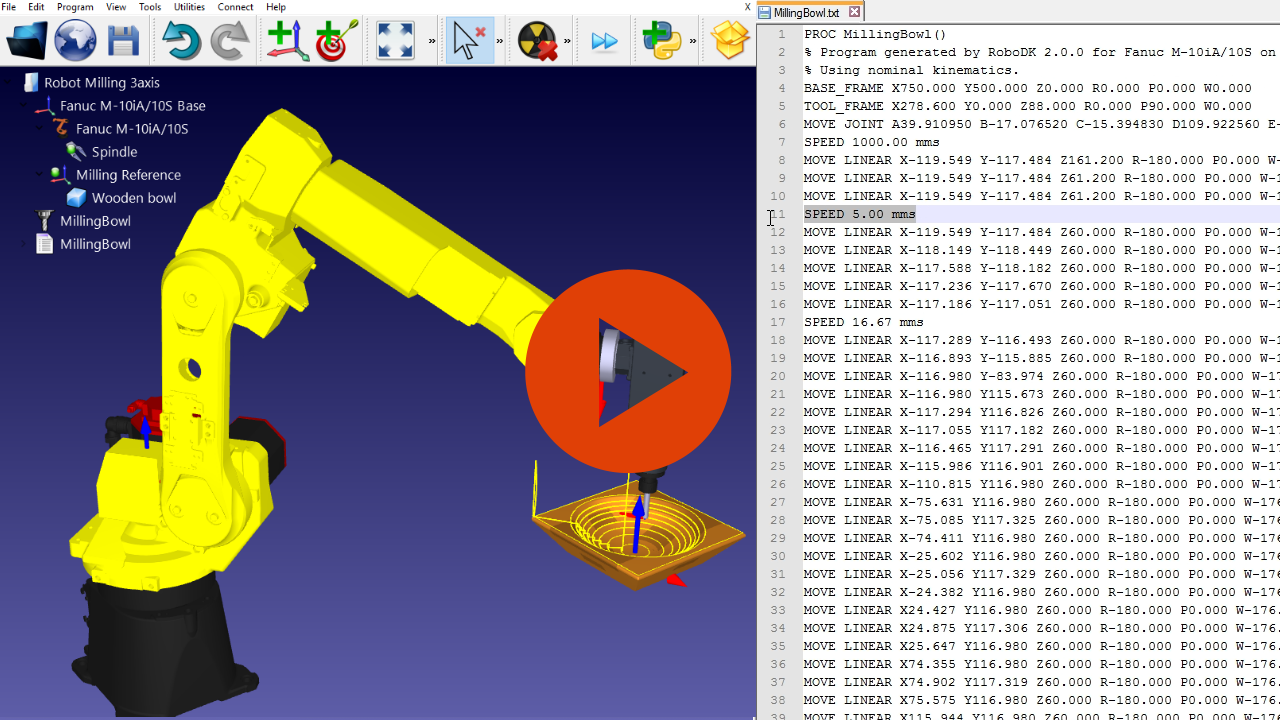
ヒント: ポストプロセッサーをダブルクリックして、サンプルのロボットプログラムのプレビューを表示します。
- 0:17 プログラムの準備ができたら、F6を選択してロボットプログラムを生成します。
- 0:35 [プログラム]-[ポストプロセッサーを追加/編集]を選択して、ポストプロセッサーを作成または編集します。
- 0:56 関節と直線移動のコマンドを編集して、望む結果を得る
- 1:16 プログラムを右クリックし、[ポストプロセッサーを選択]を選択してポストプロセッサーを選択します。