RoboDK実例
次の実例は、シミュレーションおよびオフラインプログラミング用にRoboDKの基本的な使用方法を示しています。これらの例は、デフォルトのダウンロードで入手できます。
RoboDKで[ファイル]-[開く]を選択して、特定の例を読み込みます。
ピックアンドプレース
ロボットでピックアンドプレースの自動化により、ある場所から部品を取り出して別の場所に配置するプロセスがスピードアップし、生産率が向上します。
このビデオチュートリアルは、シミュレーションとオフラインプログラミング用にRoboDKの概要を示しています。
ロボット加工
ロボットによるフライス加工は、CNC業界でますます人気が高まっています。 RoboDKソフトウェアは、NCコードをロボットプログラムに変換する最適なソリューションです。
特異点、軸制限、衝突の回避を気にせずにRoboDKでロボットプログラムを簡単に生成します。
外部軸でロボット加工
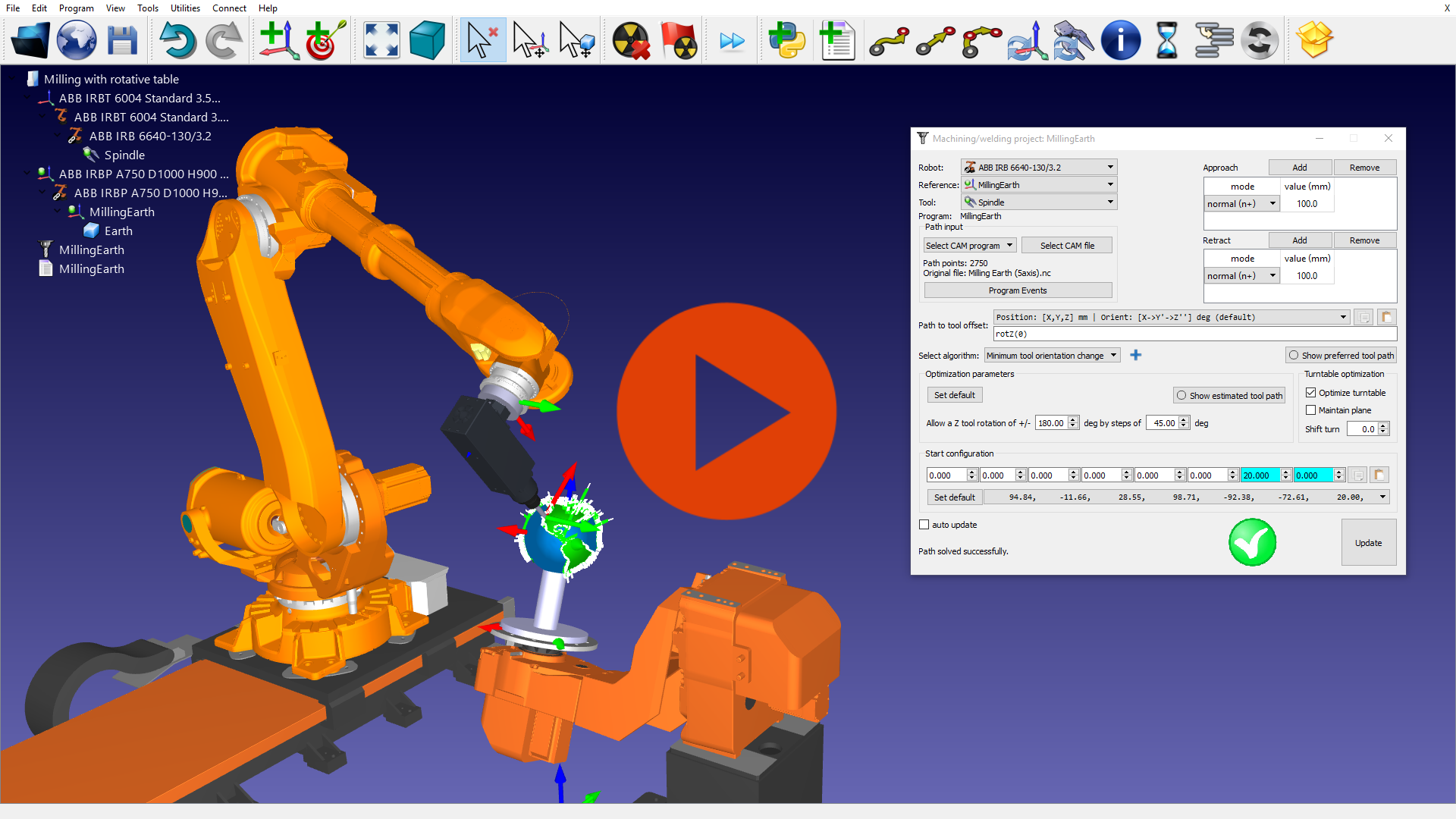
ロボット加工の為に、外部軸をモデル化し、ロボットアームと同期させることができます。 RoboDKは、ロボットの軸を最適化して、エラーのない最適なロボットプログラムを生成します。
この例は、ABBロボットアームをターンテーブルと一緒に使用して、球体を加工する方法を示しています。
ロボット塗装
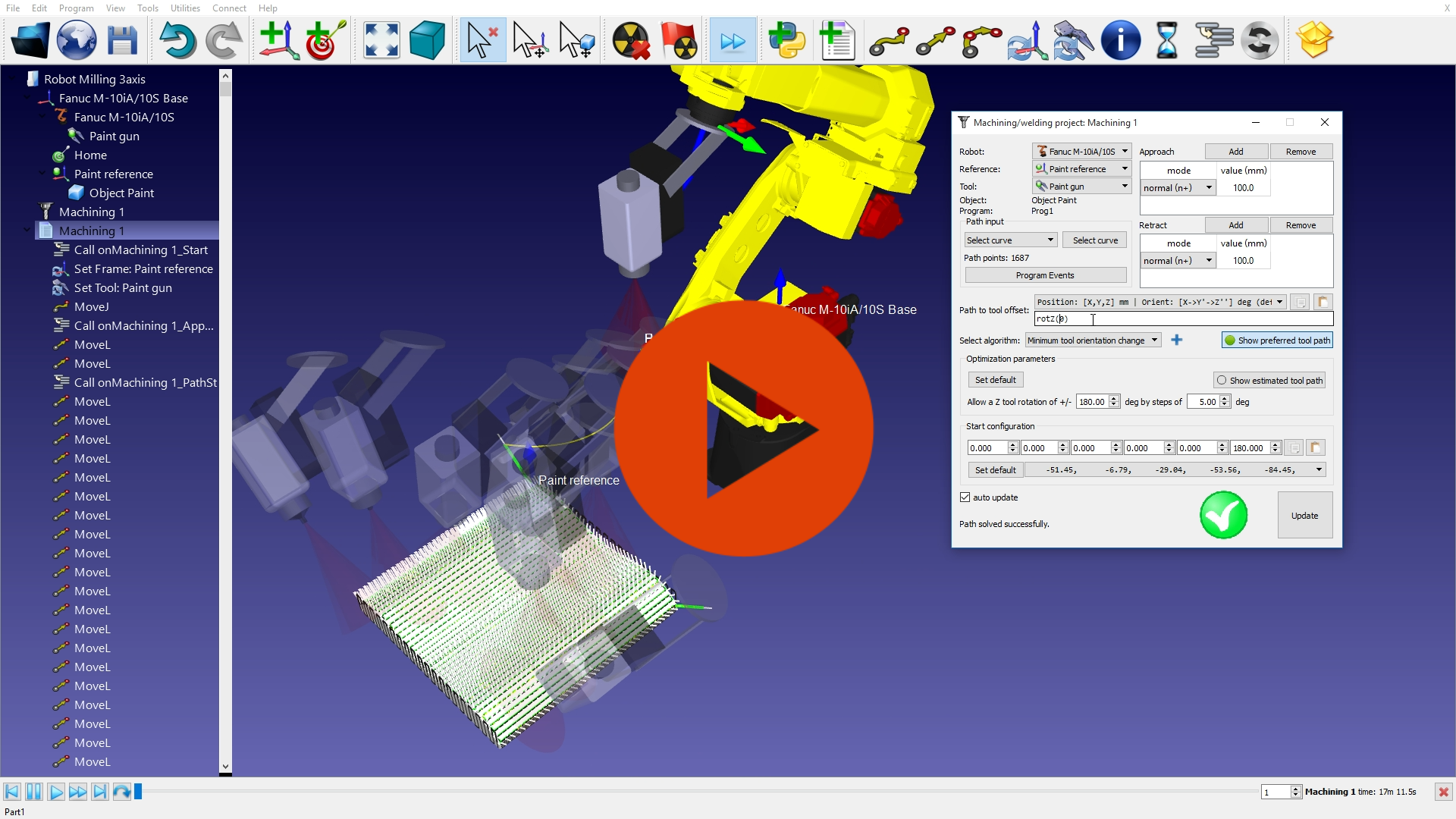
RoboDKは、塗装または検査アプリケーションの為に、表面に沿ってロボットパスを簡単に生成できます。 RoboDKは、ロボットの特異点、軸の制限、および衝突を自動的に回避します。
表面上のターゲットも数ステップで作成でき、ロボットプログラムはほんの数分で取得できます。
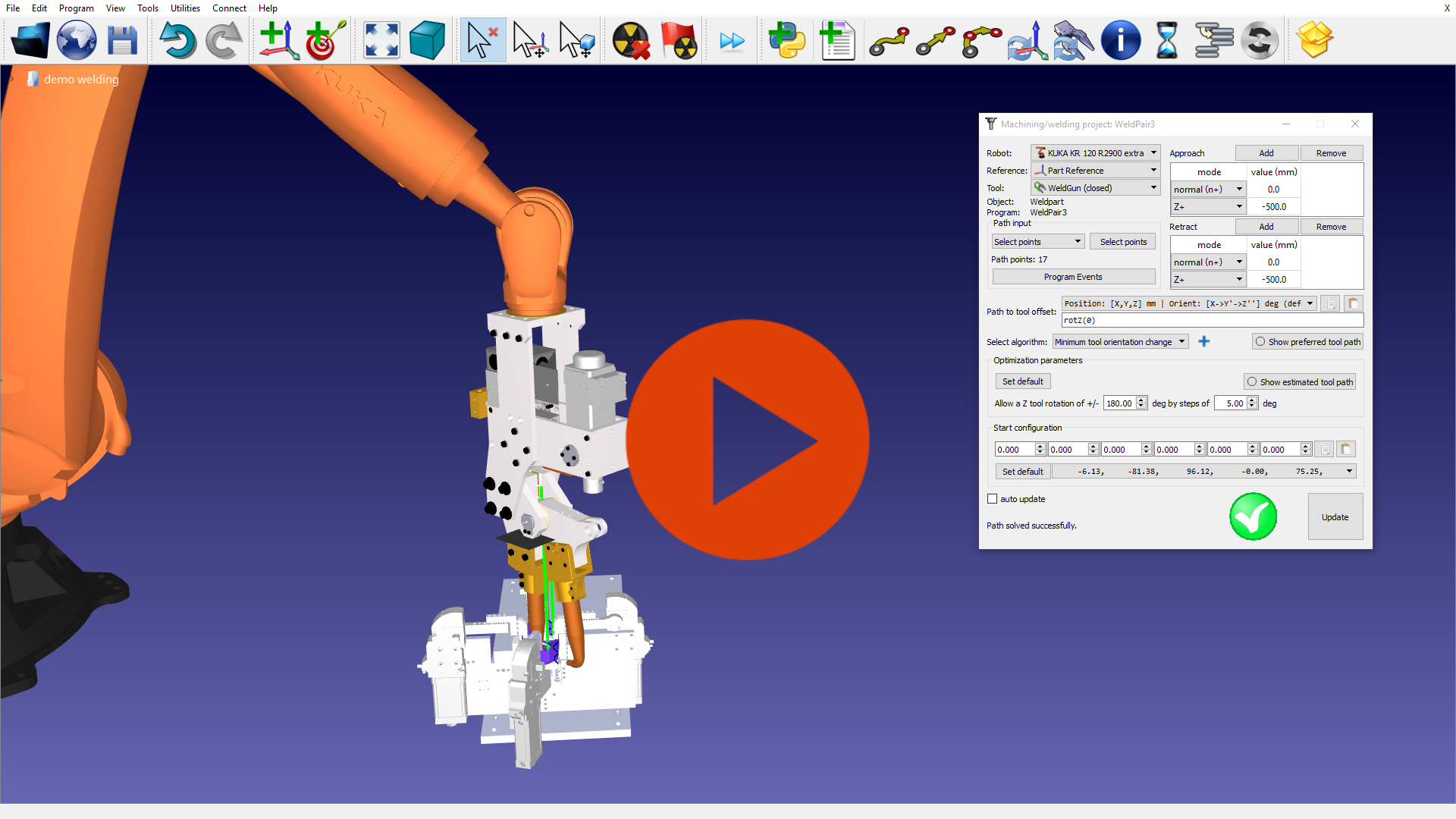
ロボットスポット溶接
ロボットのスポット溶接は、抵抗溶接の一種です。ロボットで行う溶接の中でスポット溶接は、最も一般的なタイプです。 RoboDKソフトウェアは、スポット溶接アプリケーション用にエラーのないロボットプログラムを簡単に生成できます。
このビデオは、クーカロボットとHMDテクノロジーの溶接ガンを使用したスポット溶接のアプリケーションを示しています。
コンベアベルト
ベルトコンベアシステムは、RoboDKでサポートされている多くのタイプのメカニズムの1つです。 RoboDKでは、コンベヤベルト、リニアレール、ターンテーブルなどの新しいメカニズムをモデル化できます。
この例は、2台のロボットがコンベヤベルトから部品を供給および取り出す方法を示しています。
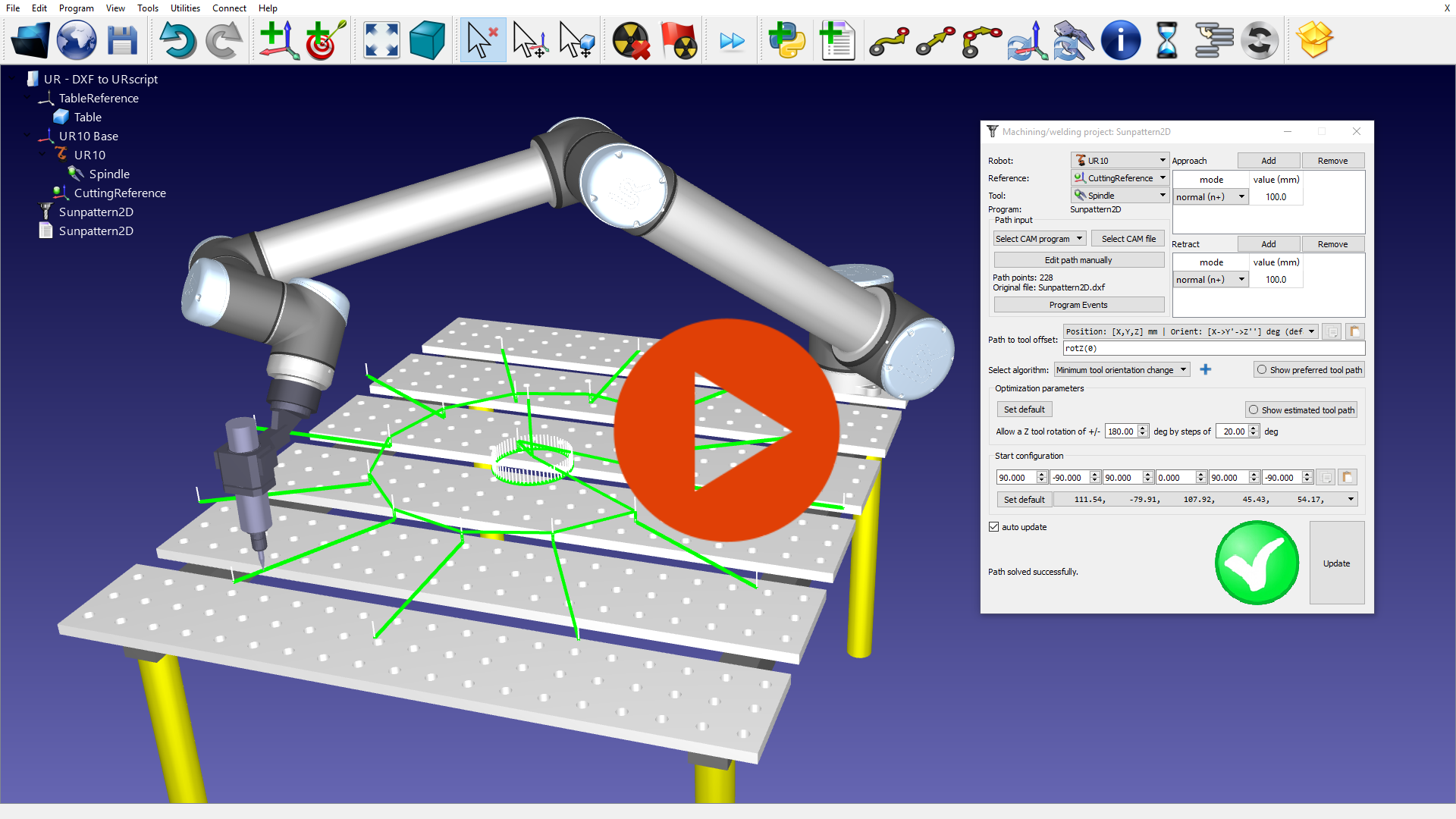
DXFからロボットプログラムへ
RoboDKのシミュレーションおよびオフラインプログラミング機能を使用して、DXFファイルからロボットプログラムが生成できます。
例えば、DXFプログラムは、簡単に切断用などにNCコードに変換できます。 この例では、DXFファイルを変換して、URロボット用にロボットプログラム(SCRIPTまたはURP)を生成する方法を示します。
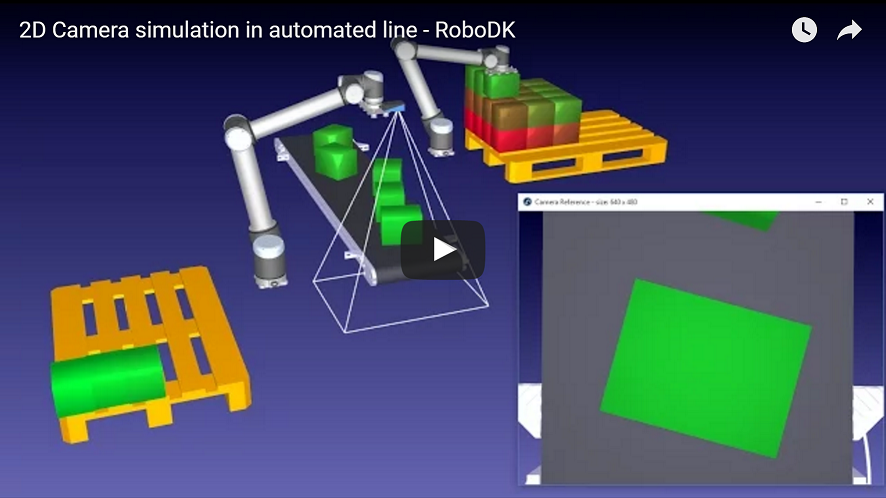
自動検査
マシンビジョンとも呼ばれる自動検査は、ロボットによるピックアンドプレイスアプリケーションの主要なテクノロジー分野の1つになります。 RoboDKソフトウェアを使用すると、検査カメラのシミュレーションとシミュレートされたスナップショットのトリガーが非常に簡単になります。焦点距離、視野、作動距離、センサーサイズなどのカメラ設定が簡単に調整できます。カメラの作業スペースも表示できます。
この例では、2台のロボット(ユニバーサルロボット)と2D検査カメラがパレタイジングタスクを実行します。
Pythonでピックアンドプレース
この例は、高度なピックアンドプレースシミュレーションを示しています。ロボットの移動とオブジェクトの置き換えは、パイソンを介して行われます。
RoboDKのPython APIを使用すると、パイソンを介して任意のロボットがプログラミングできます。 さらに、シミュレータと対応して、プログラムでロボットやオブジェクトを作成、変更、編集できます。
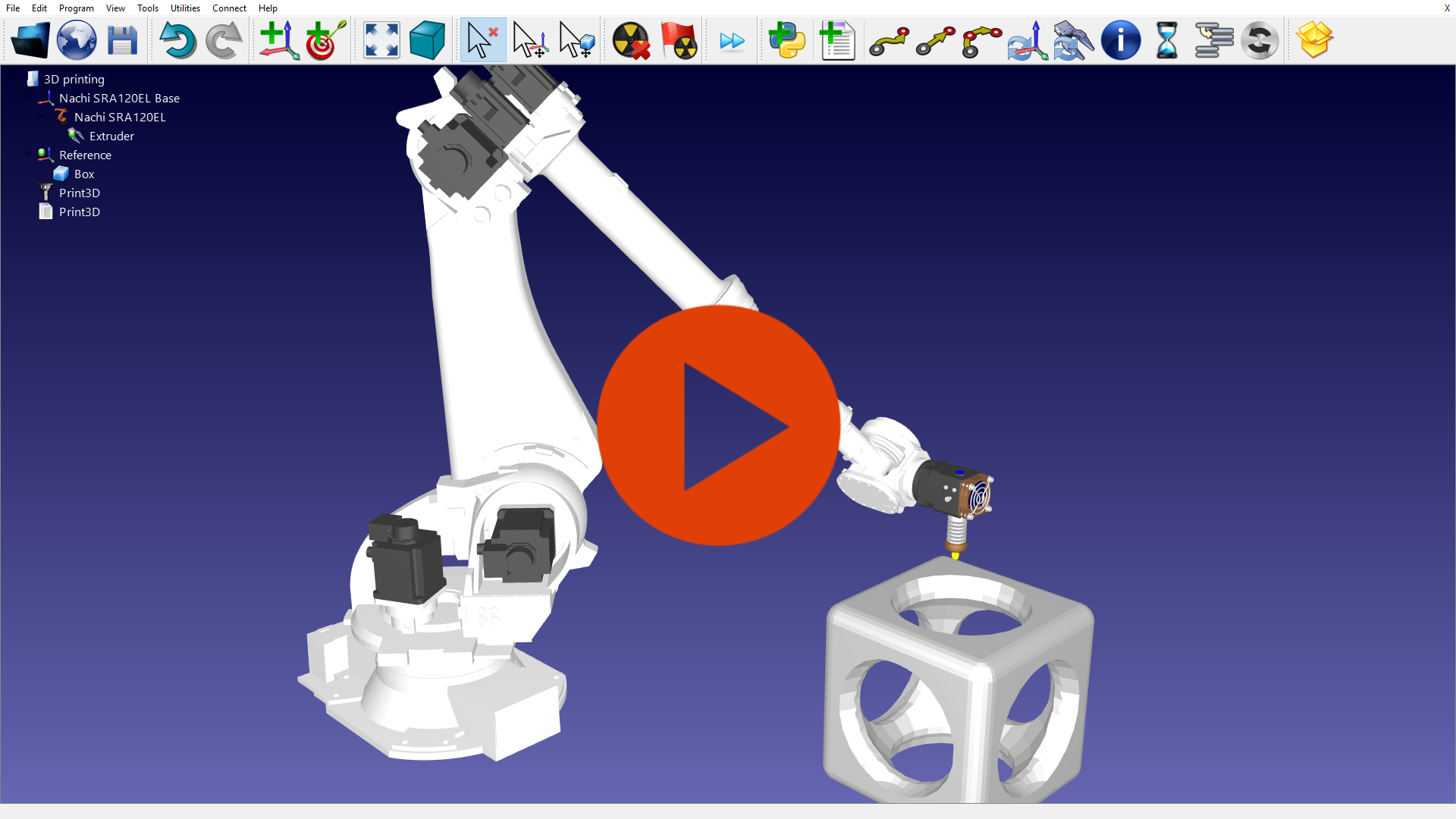
描画ロボット
描画ロボットは、自動的にアーティストのような画像を描画できます。
自動描画は、RoboDK APIを使用して実現できます。 RoboDK APIを使用すると、サードパーティのPythonライブラリを使用して、SVG画像をロボットパスに変換できます。