Калибровка роботов
Калибровка — это процесс определения реальных геометрических характеристик в кинематической модели промышленного робота. Она позволяет повысить точность позиционирования в режиме автономного программирования.
Весь процесс калибровки в системе RoboDK занимает не более 20 минут.
Основные возможности калибровки в RoboDK
- Автоматическое проведение измерений и получение результатов
- Автоматическое избегание столкновений
- Применение RoboDK API позволяет настраивать рабочую зону для проведения калибровки
- Поддерживается работа с любыми трёхосевыми или шестиосевыми системами измерений
- Процесс калибровки позволяет отслеживать до 30 параметров робота
- Точность позиционирования после калибровки может возрасти в 10 раз
- Поддерживаются более 500 роботов от 50 производителей
- Поддерживается проведение испытаний по методике ISO 9283
- Получаемые результаты точности могут быть подтверждены с помощью испытаний со стержнем Ballbar
- После калибровки нет необходимости в дополнительной правке программ фрезерования
Для подтверждения эффективности до и после калибровки можно выполнить сравнительные испытания со стержнем Ballbar или по методике ISO 9283. Возможно выполнение испытаний на точность произвольных движений, скорости и ускорения для получения детального отчёта.
Вы занимаетесь производством собственных роботов? Тогда мы можем реализовать процесс калибровки для вашей модели.
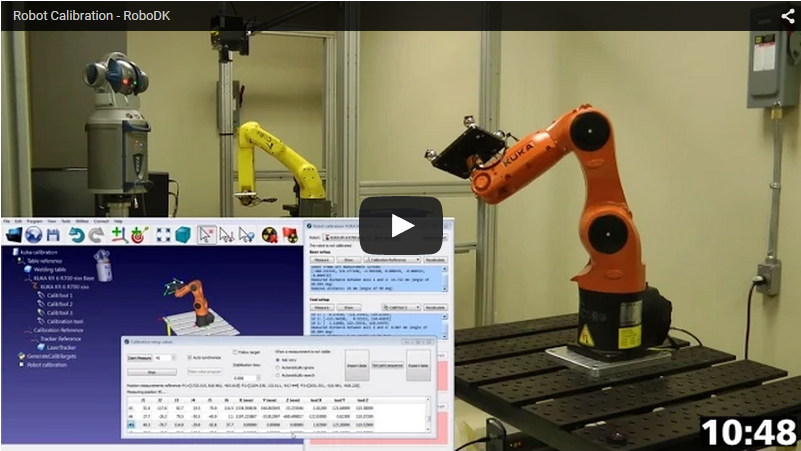
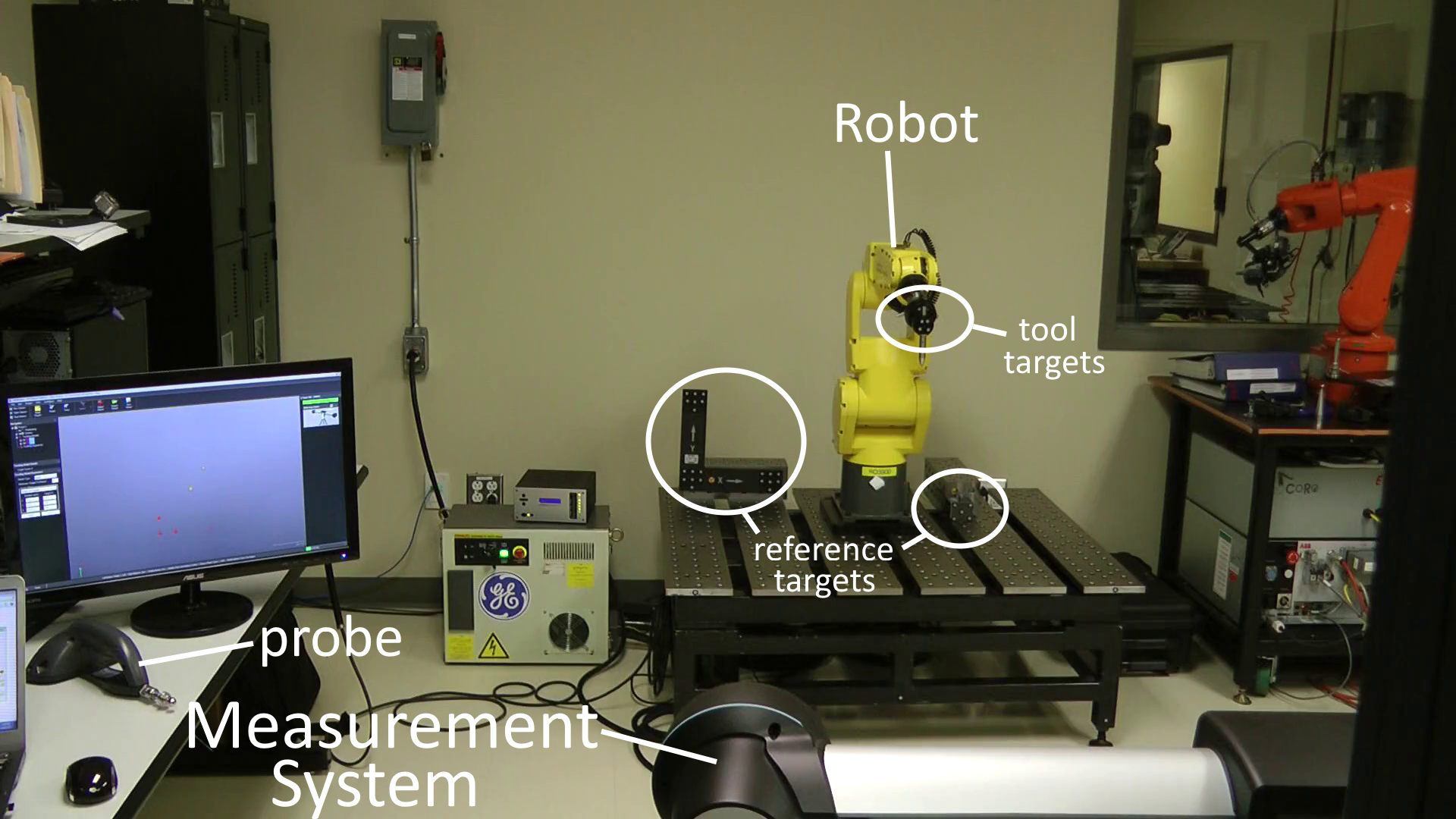
Следующие видео показывают процесс калибровки в программе RoboDK с применением стереокамеры C-Track от фирмы Creaform и лазерной системы слежения Faro. В эксперименте участвовали роботы KUKA KR 6 R700 и Fanuc LR Mate 200iC, которые калибровались вышеназванными системами соответственно. В результате точность позиционирования возросла в 8 раз.
Все испытания были проведены на базе лаборатории CoRo.
Мы подготовили статью, из которой можно узнать о преимуществах механической обработки с откалиброванным роботом.
Этапы калибровки
- Базовая калибровка (6-20 измерений)
- Калибровка инструмента (6-20 измерений)
- Калибровка робота (40-100 измерений)
- Проверка корректности (40-100 измерений)