ロボットキャリブレーション
ロボットのキャリブレーションは、ロボットの関節リンクの相対位置など、産業用ロボットの運動学的構造の実際の幾何学的パラメータを識別するプロセスです。 ロボットの調整により、オフラインプログラミングされたロボットの精度が向上します。
ロボットのキャリブレーションは、RoboDKを使用して20分未満で実行できます。 一度RoboDKのオフラインプログラミングツールを利用して、ロボットプログラムをオフラインで生成してみてください。
RoboDKキャリブレーションの主な機能
- 測定と取得を自動的に生成
- 自動化された衝突回避
- RoboDK APIで、キャリブレーション作業スペースをカスタマイズ
- あらゆる測定システムで機能
- 最大30個のパラメーターまでロボットを調整
- ロボットの精度は10倍も向上
- ほとんどのロボットメーカーをサポート
- ISO9283パフォーマンステストを簡単に実行
- 精度をボールバー精度テストと比較
- RoboDKでミリングプログラムをフィルタリングする必要はない
ロボットのキャリブレーションが完了すると、調整前後の精度をボールバーテストまたはISO 9283テスト(ロボットパフォーマンス分析)で比較することも非常に簡単になります。また、カスタマイズされた経路の精度、速度、加速をテストして、詳細なレポートを取得することもできます。
あなたはロボットメーカーですか? ロボットのキャリブレーションを簡単に統合できますよ。
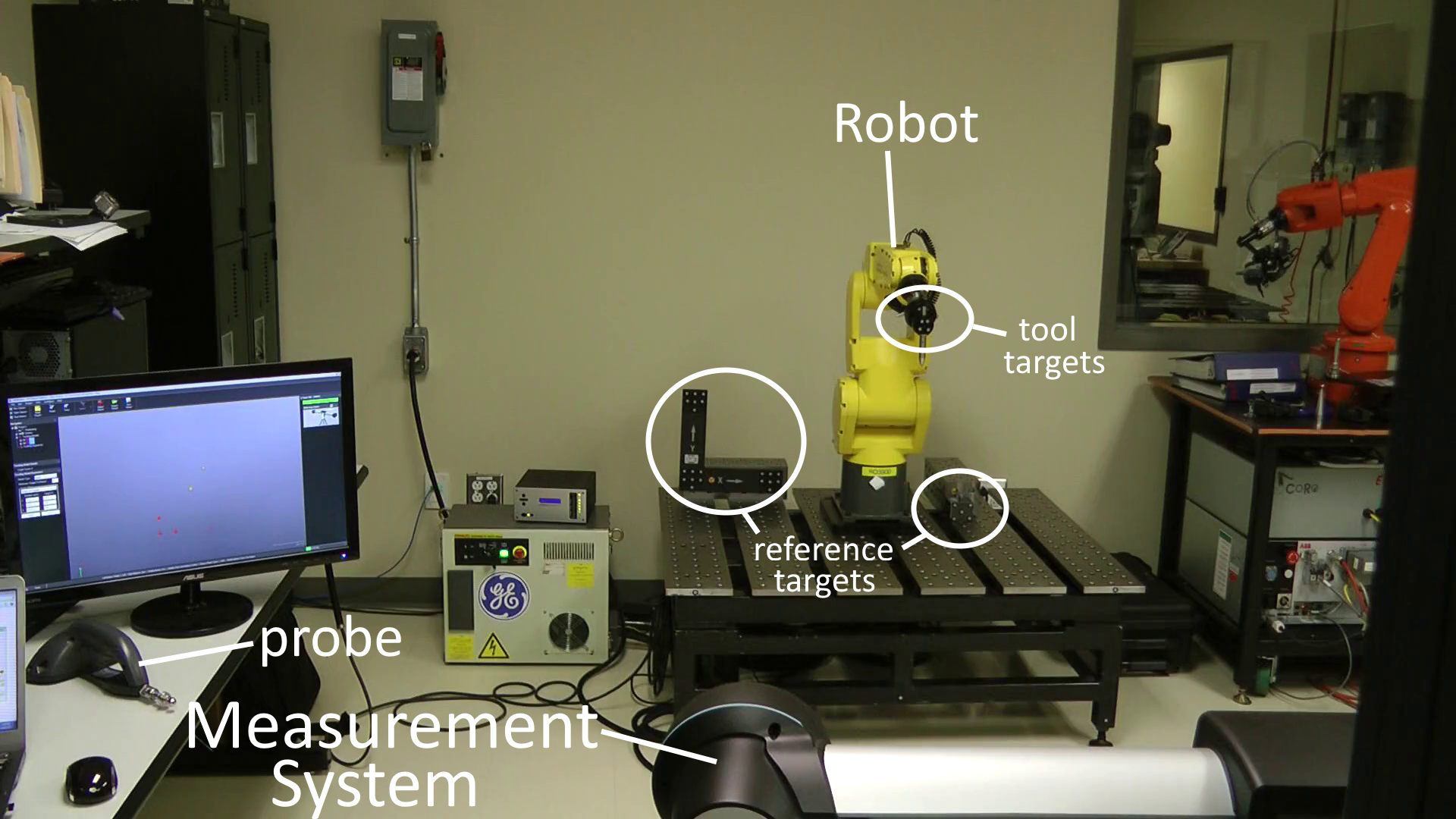
次の動画は、CreaformのC-TrackステレオカメラとFaroレーザートラッカーを使用したRoboDKによるロボットのキャリブレーション手順を示しています。 これらの測定システムでは、KUKA KR 6 R700ロボットとFanuc LR Mate 200iCがそれぞれ調整されており、精度が8倍向上しています。
これらのテストはCoRo研究所で行われました。
この記事で、キャリブレーションされたロボットによるロボット加工の利点について詳しく説明されています。
ロボットキャリブレーションの手順
- (01:38) 土台またはベースの調整 (3 minutes, 9 measurements)
- (03:37) ツールの調整 (3 minutes, 9 measurements)
- (05:30) ロボットの調整 (7 minutes, 60 measurements)
- (13:34) 検証 (7 minutes, 60 measurements)