Calibrazione robot
La calibrazione robot è il processo di identificazione dei parametri geometrici reali nella struttura cinematica di un robot industriale, ad esempio la posizione relativa dei giunti connessi al robot. La calibrazione robot migliora l'accuratezza del robot in modalità offline (Programmazione Offline).
La calibrazione robot può essere ottenuta con RoboDK in meno di 20 minuti. È sufficente generare il programma robot offline solamente una volta ed in maniera semplice, tramite gli strumenti di programmazione offline di RoboDK.
Funzionalità chiave della calibrazione con RoboDK
- Generazione completamente automatizzata di misurazioni e acquisizioni
- Evitamento automatico di collisioni
- L'API di RoboDK ti permette di personalizzare l'area di lavoro della calibrazione
- Funziona con tutti i sistemi di misurazione
- Calibra qualsiasi robot con fino a 30 parametri
- L'accuratezza del robot può essere migliorata fino a 10 volte
- Supporta la maggior parte dei produttori di robot
- Esegui facilmente il test di performance ISO9283
- Confronta l'accuratezza con il ballbar test
- Nessuna necessità di filtrare i programmi di fresatura con RoboDK
Una volta che il robot è calibrato è molto facile confrontare l'accuratezza prima e dopo la calibrazione tramite il ballbar test oppure tramite un test ISO 9283 (Analisi di Performance dei Robot). Puoi anche eseguire test di accuratezza personalizzati per tracciati, velocità ed accelerazione in modo da ottenere un resoconto dettagliato.
Sei un produttore di robot? Possiamo facilmente integrare la calibrazione robot per i tuoi robot.
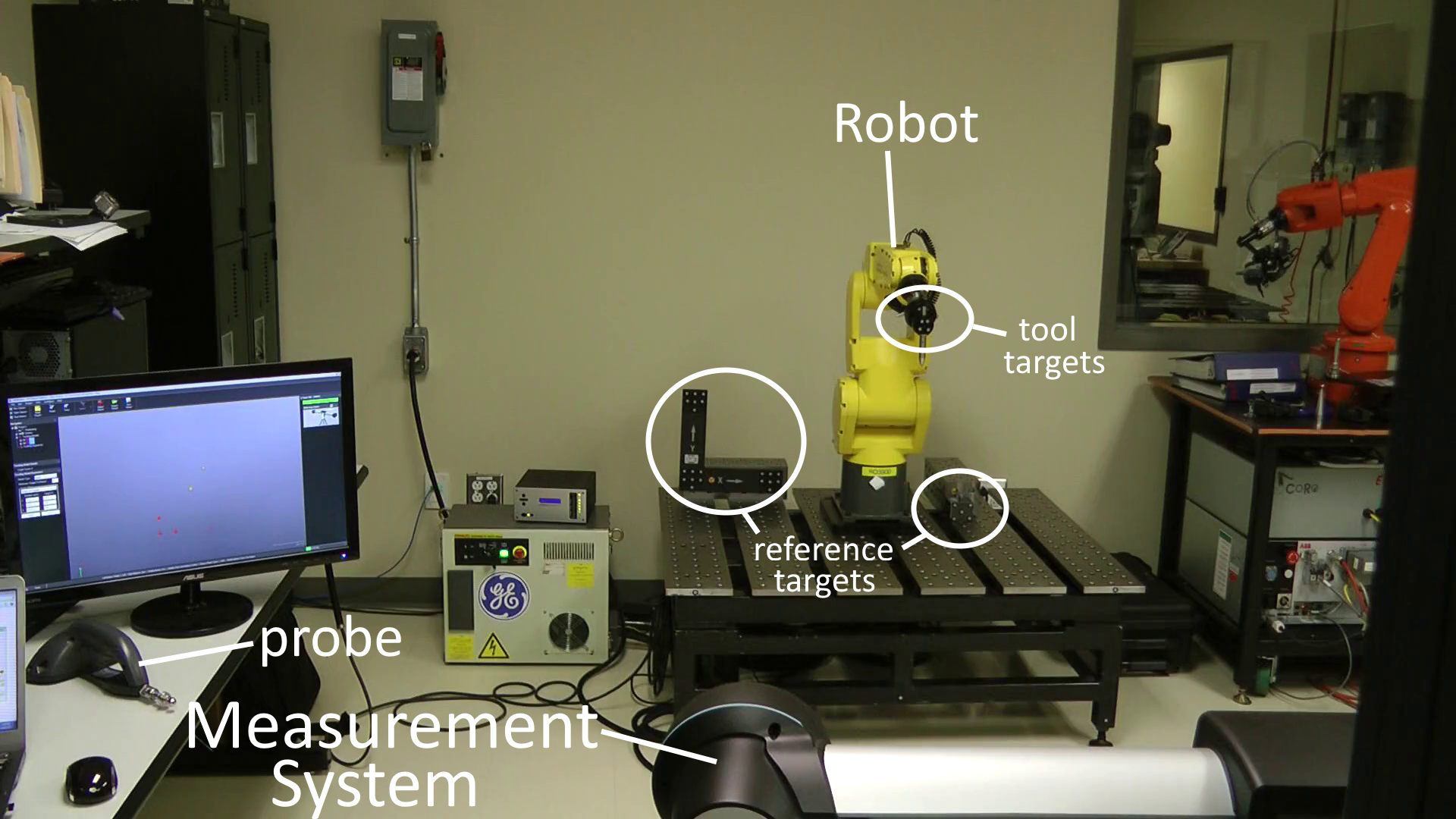
Il seguente video mostra la procedura di calibrazione robot con RoboDK utilizzando un laser tracker Faro e una stereocamera Creaform C-Track. Un robot KUKA KR 6 R700 ed un Fanuc LR Mate 200iC sono stati calibrati rispettivamente con questi sistemi di misurazione, migliorandone l'accuratezza di 8 volte.
Questi test sono stati eseguiti ai laboratori CoRo.
Scopri di più riguardo ai vantaggi di una fresatura utilizzando un robot calibrato in questo articolo.
Passaggi per una calibrazione robot
- (01:38) Calibrazione della base (3 minuti, 9 misurazioni)
- (03:37) Misurazione del tool (3 minuti, 9 misurazioni)
- (05:30) calibrazione robot (7 minuti, 60 misurazioni)
- (13:34) Validazione (7 minuti, 60 misurazioni)