로봇 보정
로봇 교정은 로봇에서 조인트 링크의 상대 위치와 같은 산업용 로봇의 운동 학적 구조에서 실제 기하학적 파라미터를 식별하는 프로세스입니다. 로봇 교정은 오프라인으로 프로그래밍 된 로봇의 정확도를 향상시킵니다 (오프라인 프로그래밍).
로봇 교정은 RoboDK로 20 분 이내에 완료 할 수 있습니다. RoboDK의 오프라인 프로그래밍 도구를 사용하여 로봇 프로그램을 오프라인에서 쉽게 한 번 생성할 수 있습니다.
RoboDK 보정 주요 기능
- 완전 자동 측정 생성 및 수집
- 완전 자동 충돌 방지
- RoboDK API를 이용한 보정 작업 공간 사용자 정의
- 모든 측정 시스템에서 작동
- 최대 30 개의 매개 변수로 로봇을 교정
- 로봇 정확도 10 배 향상
- 대부분의 로봇 제조업체는 지원
- ISO9283 성능 테스트를 쉽게 수행
- 볼바 정확도 테스트와 정확도 비교
- RoboD에서 밀링 프로그램을 필터링 불필요
로봇이 보정되면 보정 전/후의 정확도를 볼바 테스트 또는 ISO 9283 테스트(로봇 성능 분석)과 매우 쉽게 비교할 수 있습니다. 맞춤형 경로 정확도, 속도 및 가속도 테스트를 실행하고 자세한 보고서를 얻을 수도 있습니다.
로봇 제조업체입니까? 우리는 로봇의 로봇 교정을 쉽게 통합 할 수 있습니다.
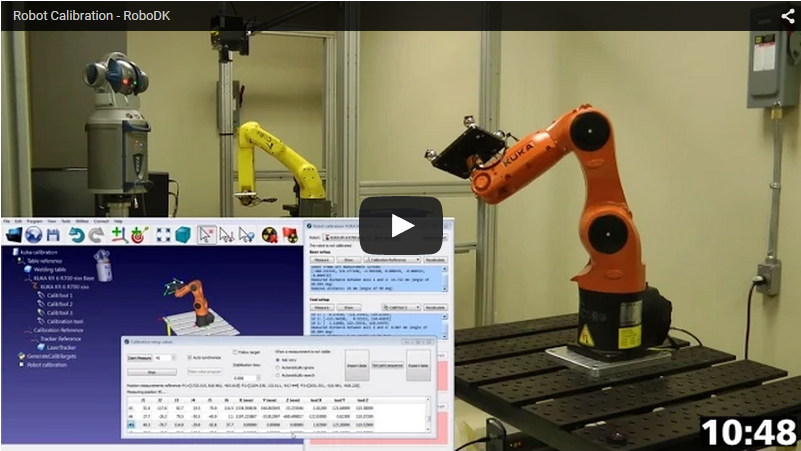
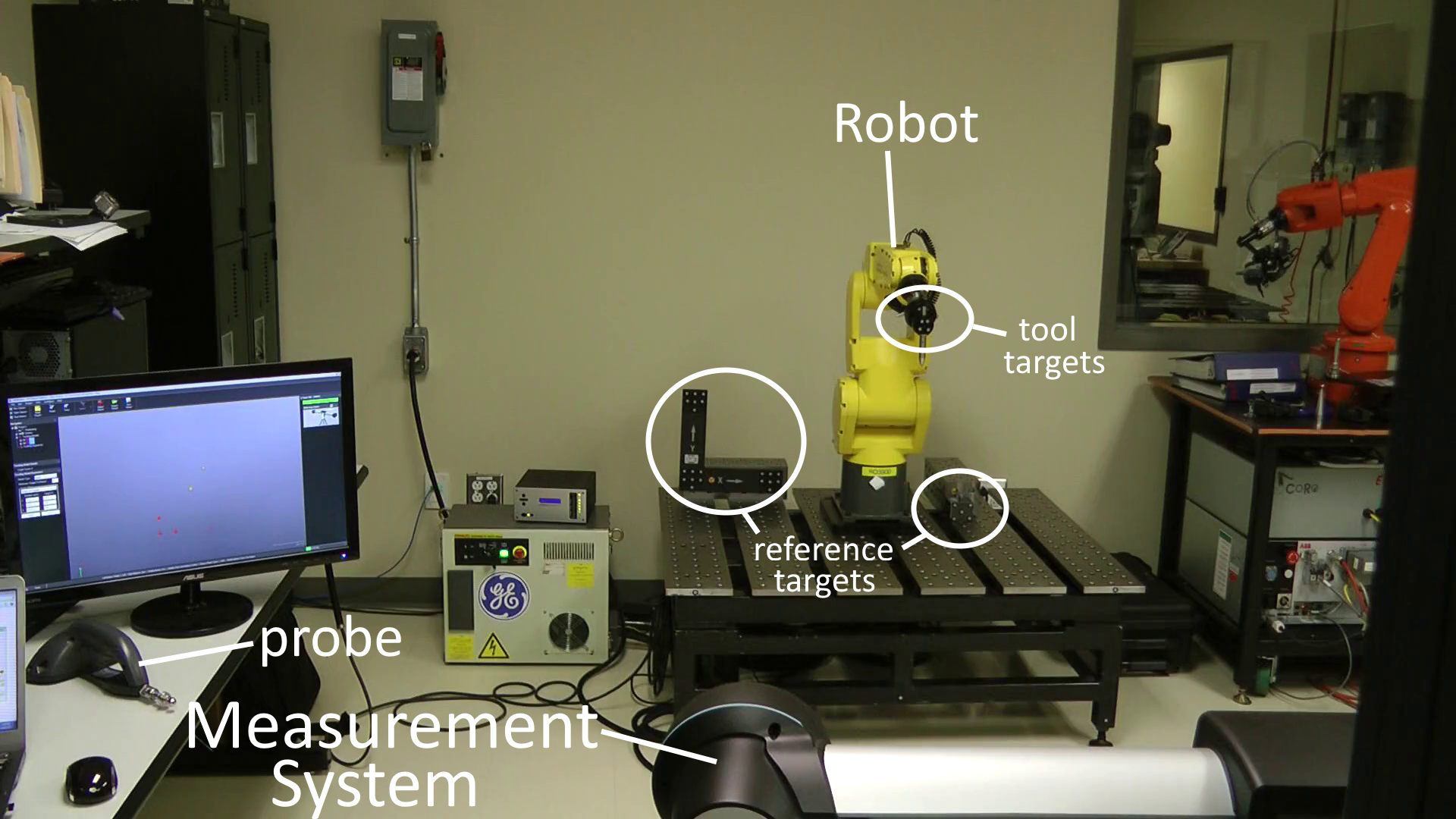
다음의 비디오들은 Creaform의 C-Track 스테레오 카메라와 Faro 레이저 트랙커를 이용한 RoboDK에서의 로봇 보정 과정을 보여줍니다. KUKA KR 6 R700 로봇과 Fanuc LR Mate 200iC이 측정 시스템으로 각각 교정되어 정확도가 8 배 향상되었습니다.
이 시험들은 CoRo laboratory에서 수행되었습니다.
보정 된 로봇으로 로봇 가공의 이점에 대해 이 글에서 자세히 알아보십시오.
로봇 보정 단계
- (01:38) 기본 보정 (3 분, 9번 측정)
- (03:37) 툴 보정 (3 분, 9번 측정)
- (05:30) 로봇 보정 (7 분, 60번 측정)
- (13:34) 검증 (7 분, 60번 측정)