RoboDK 예제
다음 예제들은 시뮬레이션 및 오프라인 프로그래밍에서 RoboDK의 기본 사용법을 보여줍니다. 이 예제는 기본 다운로드와 함께 사용할 수 있습니다.
특정 예제를 로드하려면 RoboDK에서 파일-열기를 선택하십시오.
픽 앤 플레이스
로봇 픽 앤 플레이스 자동화는 한 위치에서 부품을 잡고 다른 위치에 놓는 과정을 가속화하여 생산 속도를 높입니다.
이 비디오 튜토리얼은 시뮬레이션 및 오프라인 프로그래밍을위한 RoboDK의 개요를 보여줍니다.
로봇 가공
CNC 산업에서 로봇 밀링이 점점 더 대중화되고 있습니다. RoboDK 소프트웨어는 NC 코드를 로봇 프로그램으로 변환하는 완벽한 솔루션입니다.
RoboDK를 사용하면 특이점, 축 제한이없고 충돌을 피하면서 로봇 프로그램을 쉽게 생성 할 수 있습니다.
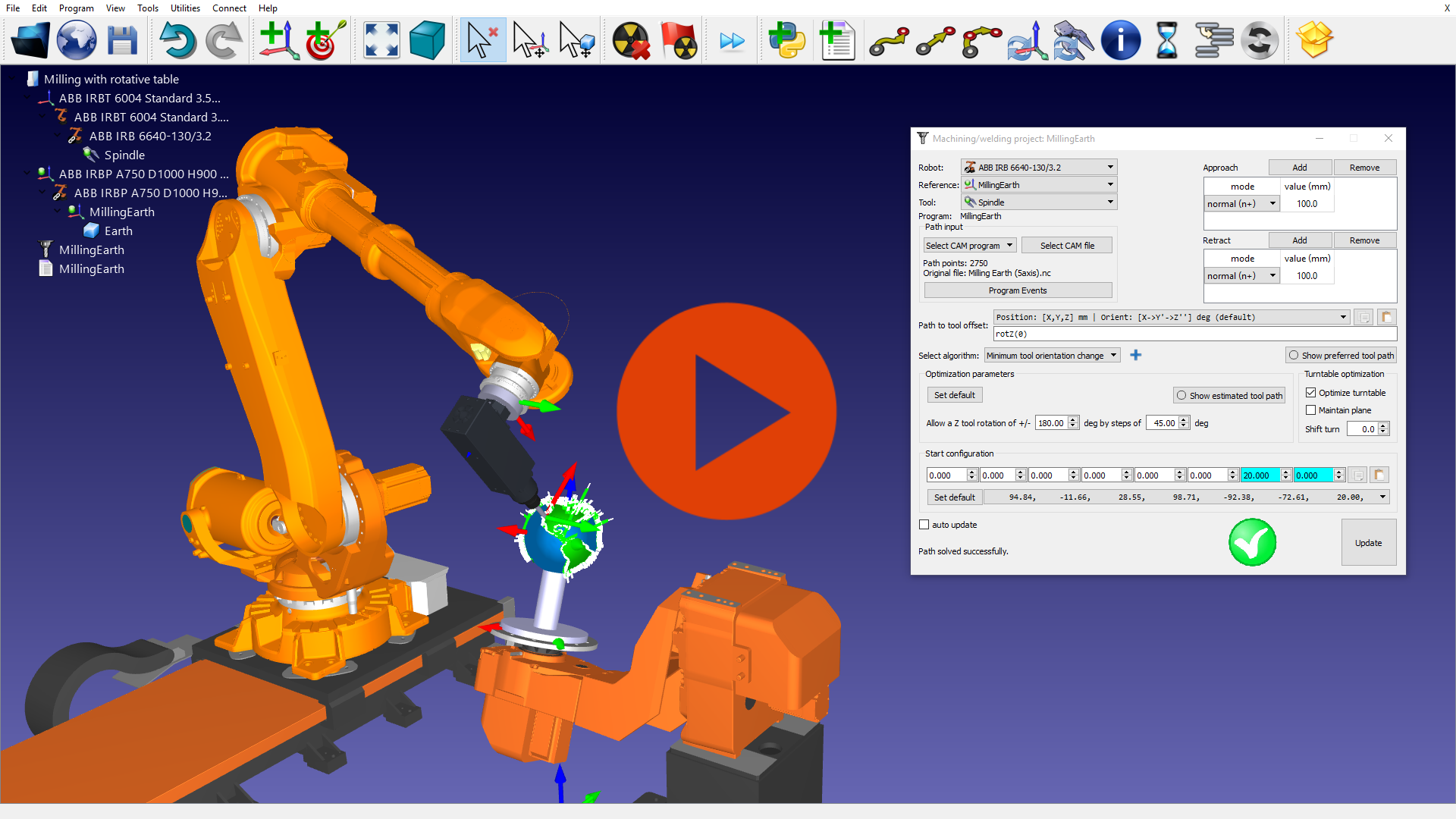
외부 축을 이용한 로봇 가공하기
로봇 가공을 위해 로봇 축과 외부 축을 모델링하고 동기화 할 수 있습니다. RoboDK는 로봇 축을 최적화하여 오류없이 최적의 로봇 프로그램을 생성합니다.
이 예제는 ABB 로봇 암을 턴테이블과 함께 사용하여 구형 물체를 가공하는 방법을 보여줍니다.
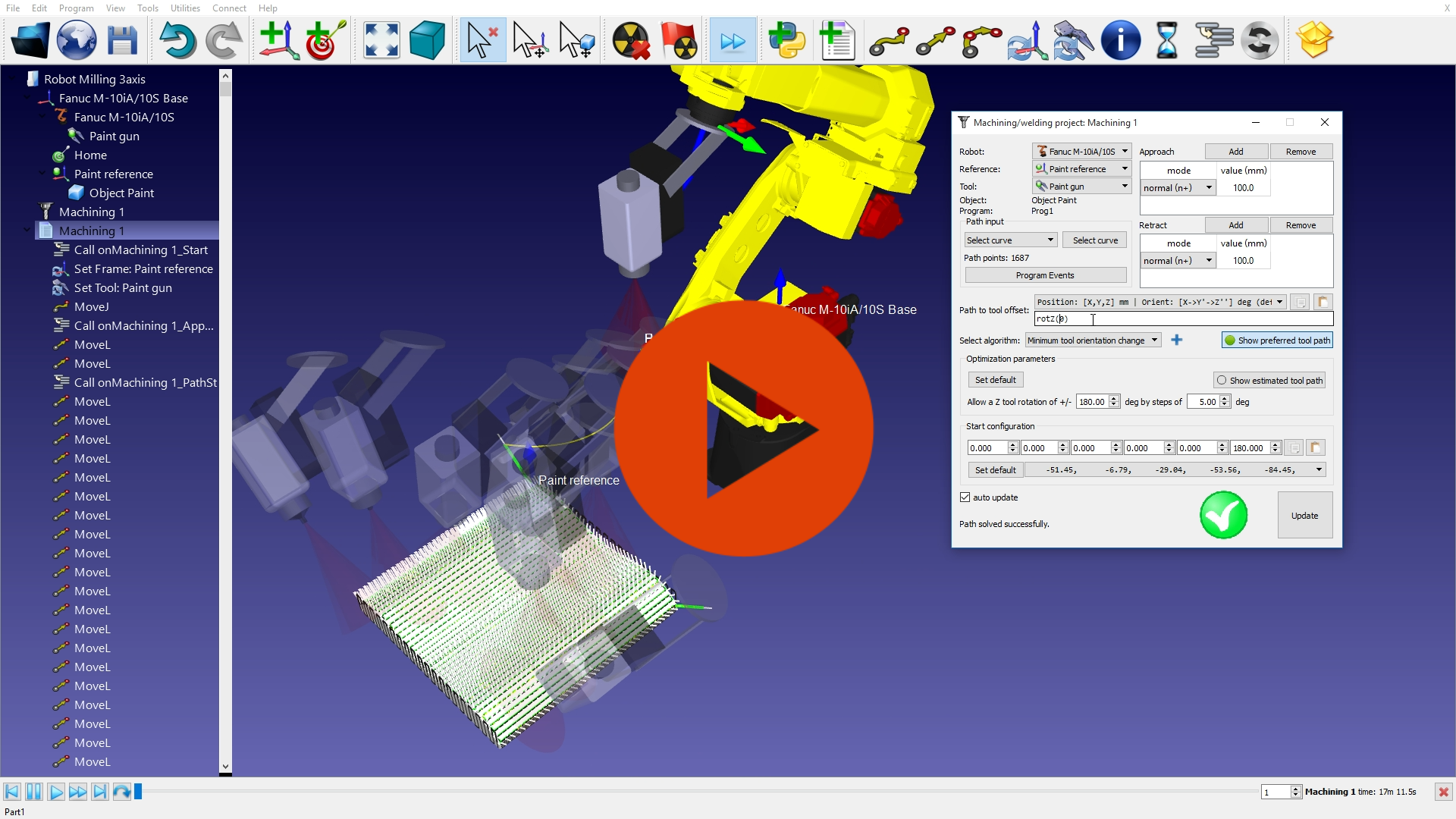
로봇 페인팅
RoboDK는 페인팅 또는 검사 어플리케이션을 위해 표면을 따라 로봇 경로를 쉽게 생성 할 수 있습니다. RoboDK는 로봇 특이성, 축 제한 및 충돌을 자동으로 방지합니다.
표면에있는 목표물도 몇 단계 만 거치면 로봇 프로그램을 몇 분 안에 얻을 수 있습니다.
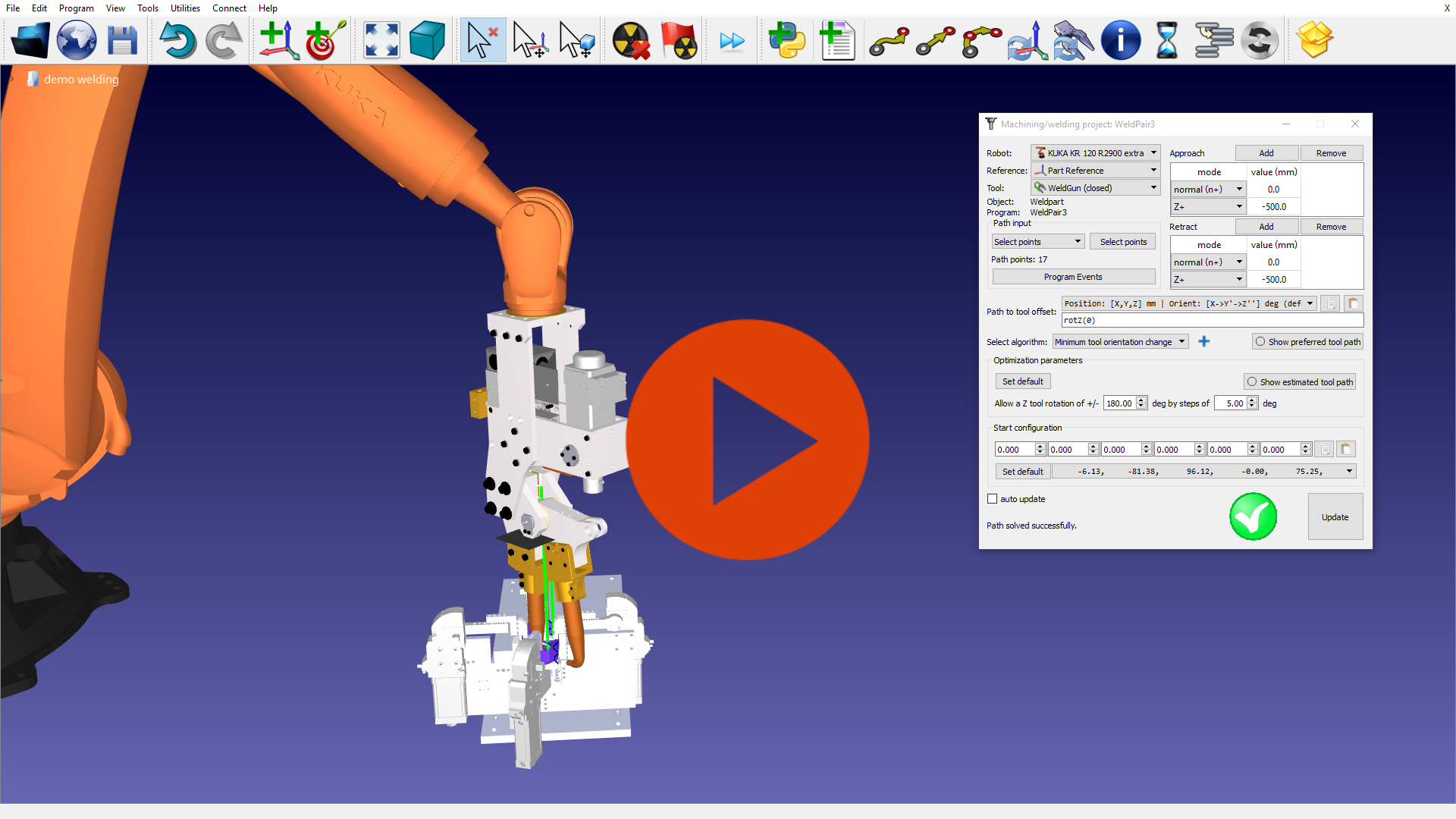
로봇 스팟 용접
로봇 점 용접은 저항 용접의 한 유형입니다. 스폿 용접은 가장 일반적인 로봇 용접 유형입니다. RoboDK는 스폿 용접 어플리케이션을 위한 오류없는 로봇 프로그램을 쉽게 생성 할 수 있습니다.
이 비디오는 KUKA 로봇과 HMD Technology 용접 건을 사용한 스폿 용접 어플리케이션을 보여줍니다.
컨베이어 벨트
벨트 컨베이어 시스템은 RoboDK가 지원하는 여러 유형의 메커니즘 중 하나입니다. 컨베이어 벨트, 선형 트랙 및 턴테이블과 같은 새로운 메커니즘을 RoboDK에서 모델링 할 수 있습니다.
이 예제는 두 로봇이 함께 컨베이어 벨트에서 부품을 공급하고 가져 오는 방법을 보여줍니다.
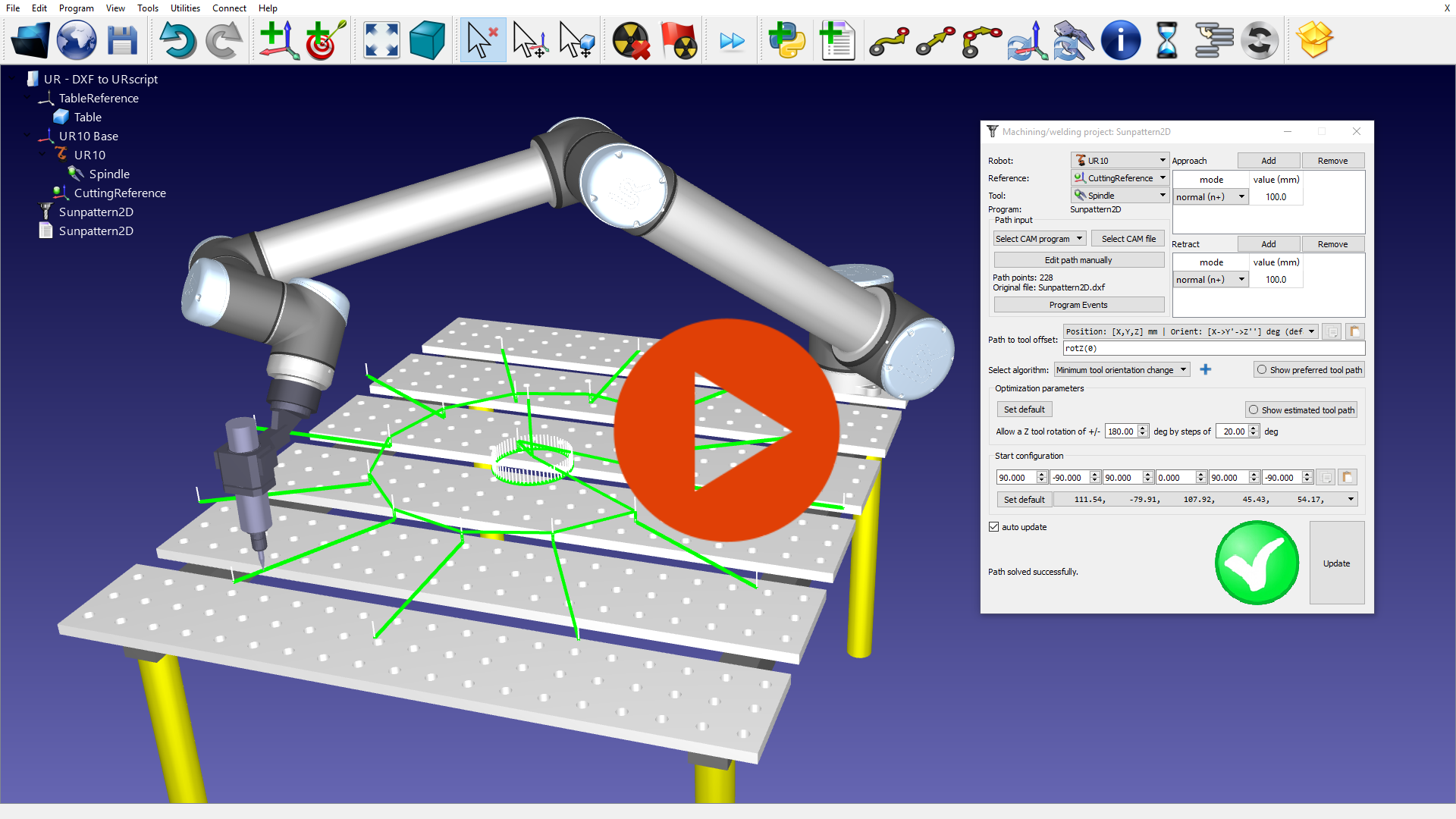
DXF를 이용한 로봇 프로그램
로봇 프로그램은 RoboDK의 시뮬레이션 및 오프라인 프로그래밍 기능을 사용하여 DXF 파일에서 생성 될 수 있습니다.
예를 들어 DXF 프로그램은 절단을 위해 NC 코드로 쉽게 변환 할 수 있습니다. 이 예제는 DXF 파일을 변환하여 UR 로봇 (SCRIPT 또는 URP)에 대한 로봇 프로그램을 생성하는 방법을 보여줍니다.
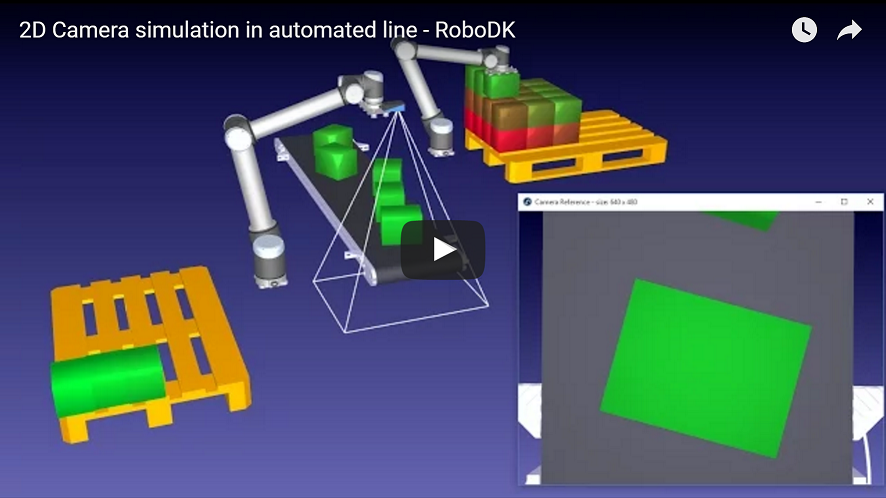
자동화된 검사
머신 비전이라고도하는 자동화 된 검사는 이제 로봇 식 픽 앤 플레이스 응용 분야의 핵심 기술 분야 중 하나입니다. RoboDK 소프트웨어를 사용하면 검사 카메라를 시뮬레이션하고 시뮬레이션 된 스냅 샷을 트리거하는 것이 매우 쉽습니다. 초점 거리, 시야, 작동 거리 또는 센서 크기와 같은 모든 카메라 설정을 쉽게 조정할 수 있습니다. 카메라의 작업 공간도 표시 할 수 있습니다.
이 예제에서는 두 로봇 (Universal Robots)과 2D 검사 카메라가 팔레타이징 작업을 보여줍니다.
파이썬을 이용한 픽 앤 플레이스
이 예는 고급 픽 앤 플레이스 시뮬레이션을 보여줍니다. 로봇을 움직이고 객체를 교체하는 것은 Python을 통해 이루어집니다.
RoboDK's Python API를 사용하면 Python을 통해 모든 로봇을 프로그래밍 할 수 있습니다. 또한 시뮬레이터와 상호 작용하여 프로그래밍 방식으로 객체 또는 로봇을 생성, 수정 또는 편집 할 수 있습니다.
그리기 로봇
그리기 로봇은 아티스트처럼 이미지를 자동으로 그릴 수 있습니다.
RoboDK API를 사용하여 자동화 된 도면을 얻을 수 있습니다. RoboDK API를 사용하면 타사 Python 라이브러리를 사용하여 SVG 이미지를 로봇 경로로 변환 할 수 있습니다.