Esempi con RoboDK
I seguenti esempi mostrano un utilizzo base di RoboDK per Simulazione e Programmazione offline. Questi esempi sono disponibili con il download predefinito.
Seleziona File-Apri in RoboDK per caricare un esempio specifico.
Pick and place
L'applicazione robotica di pick and place velocizza il processo di presa e posizionamento di oggetti da un luogo ad un altro, aumentando il fattore produttivo.
Questo video tutorial mostra una panoramica di RoboDK per simulazione e programmazione offline.
Fresatura
La fresatura robotizzata sta diventando sempre più popolare all'interno dell'industria CNC. Il software RoboDK è la soluzione perfetta per tradurre codici NC in programmi robot.
Genera facilmente programmi robot con RobotDK senza singolarità, limiti assi ed evitando collisioni.
Guarda una simulazione di fresatura.
Fresatura con asse esterno
Assi esterni possono essere modellati e sincronizzati con il braccio robotico per lavorazioni di fresatura.
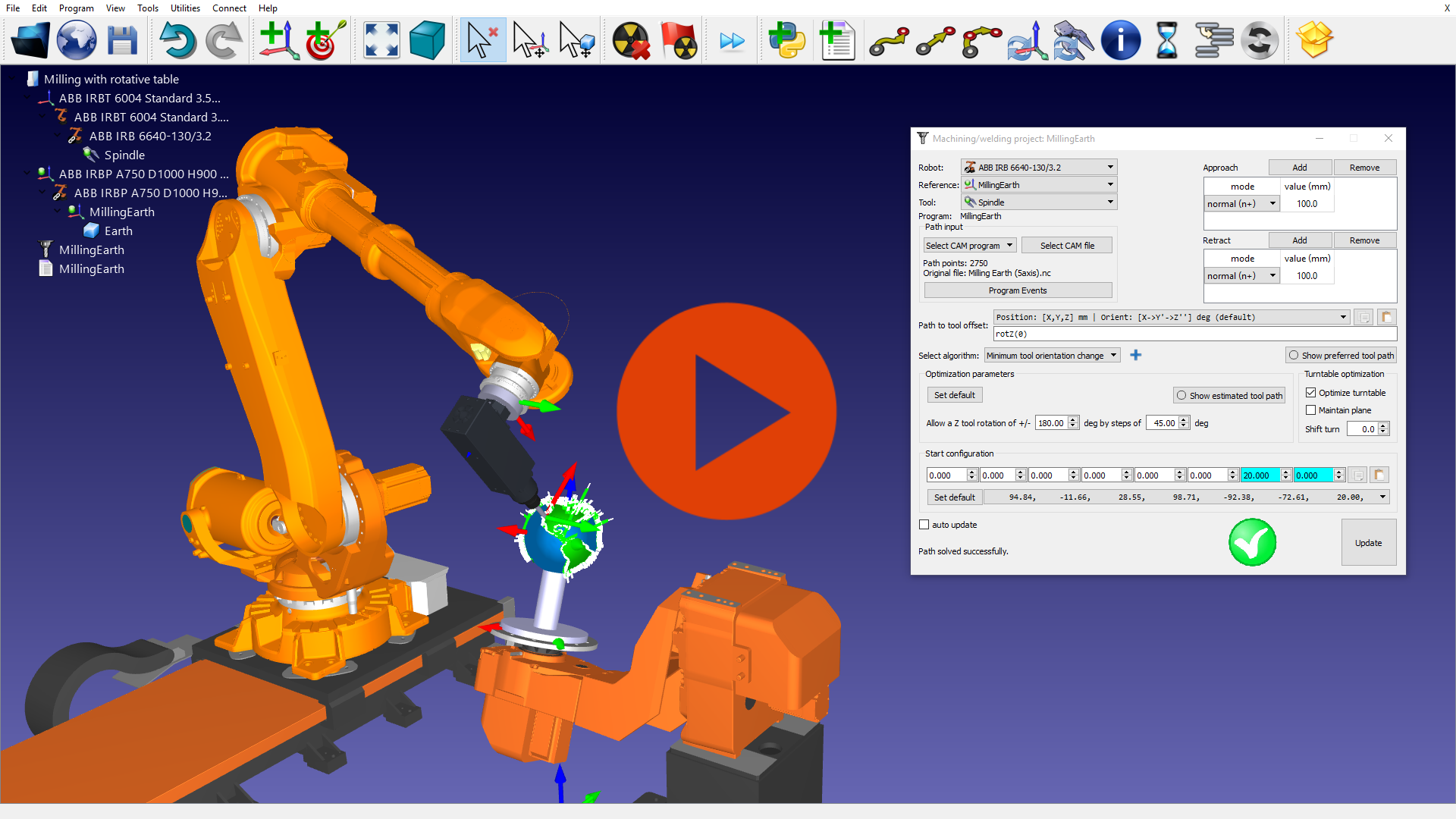
Questo esempio mostra come un braccio robotico ABB possa essere utilizzato con una tavola rotante per fresare un oggetto sferico.
Guarda una simulazione di fresatura.
Verniciatura
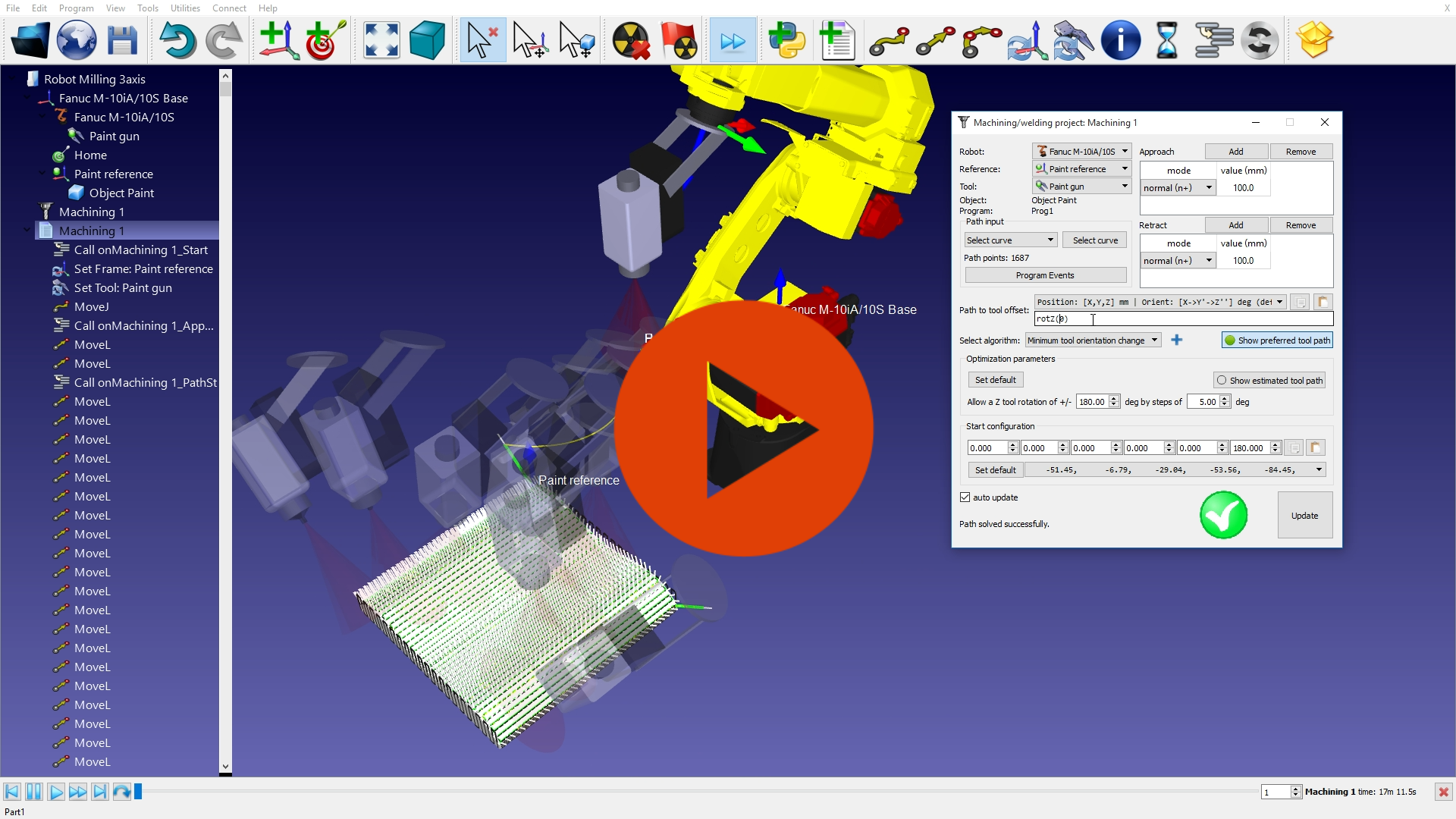
RoboDK può facilmente generare tracciati lungo superfici per applicazioni di verniciatura o ispezione.
In pochi passi si possono creare bersagli su di una superfice e generare il programma robot in pochi minuti.
Guarda una simulazione di verniciatura
Documentazione su verniciatura robotizzata
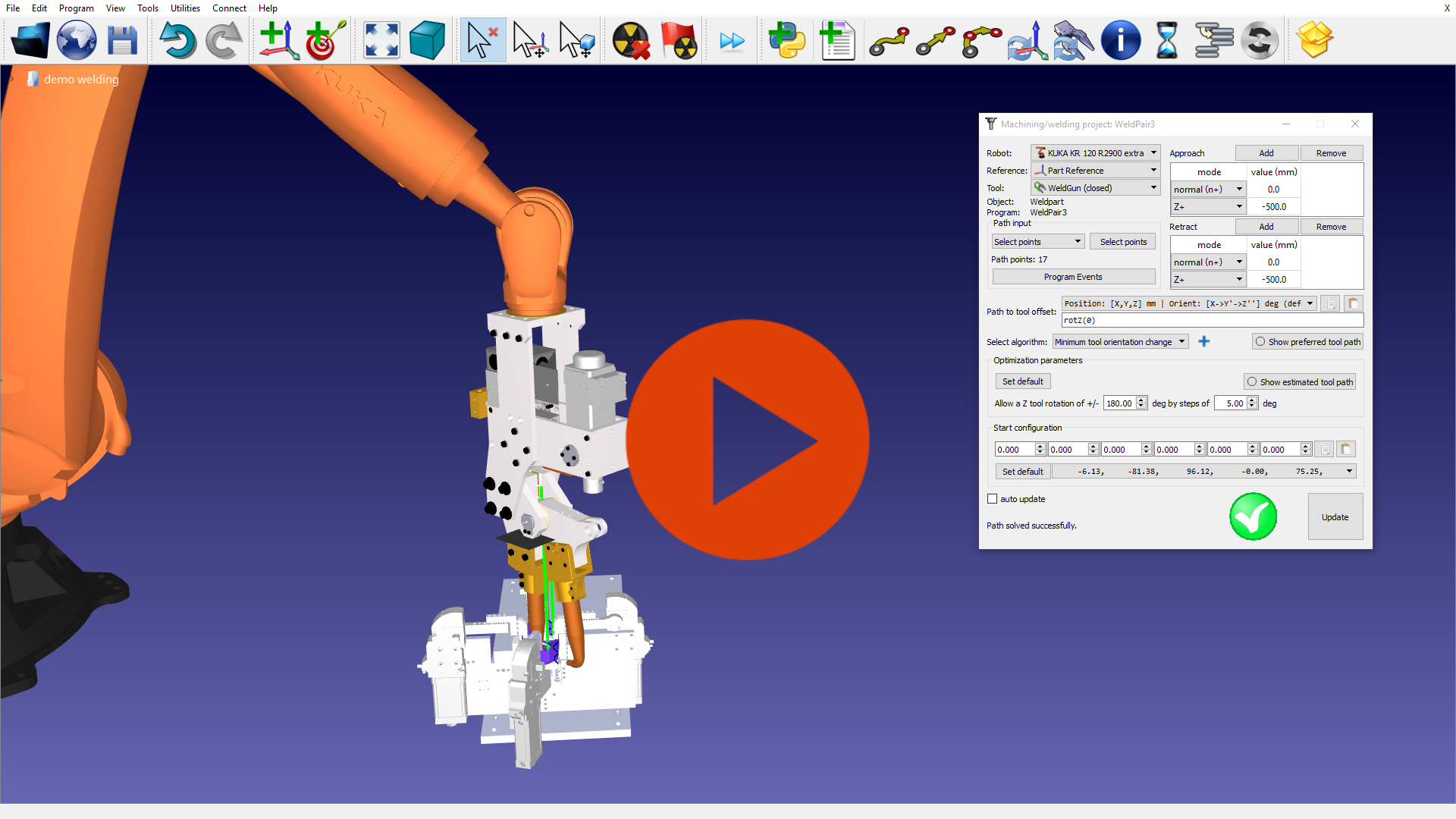
Saldatura spot
La saldatura spot è una tipologia di saldatura a resistenza. La saldatura spot è la più comune tipologia di saldatura robotizzata. Il software RoboDK può facilmente generare programmi robot esenti da errori per applicazioni di saldatura spot.
Questo video mostra un'applicazione di saldatura spot utilizzando un braccio robotico KUKA e una saldatrice HMD Technology.
Collegamento alla documentazione
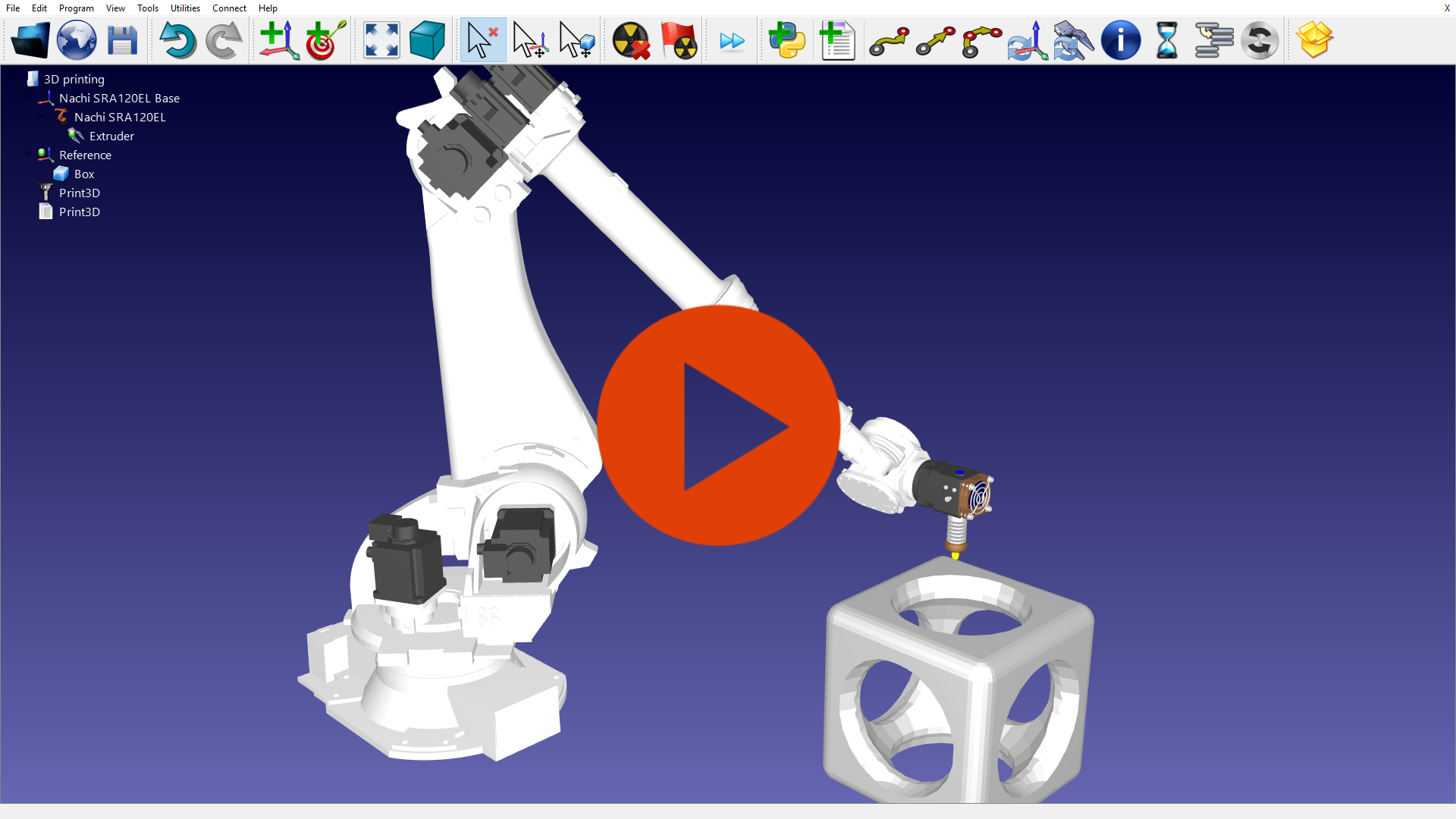
Stampa 3D
La stampa 3D coi robot (o additive manufacturing) permette di creare oggetti 3D di grandi dimensioni da un file digitale. Con il software RoboDK, bracci robotici industriali possono essere utilizzati come stampanti a tre o più assi per stampare in 3D oggetti di grandi dimensioni. RoboDK genererà un programma robot esente da errori.
Questo video mostra come un robot Nachi è stato utilizzato per stampare in 3D un oggetto di grandi dimensioni.
Collegamento alla documentazione
Nastro trasportatore
L'impianto con nastri trasportatori è una delle molteplici tipologie di meccanismi supportati da RoboDK. Nuovi meccanismi come nastri trasportatori, guide lineari e tavole rotanti possono essere modellati in RoboDK.
Questo esempio mostra come due robot lavorano assieme rifornendo e togliendo oggetti da un nastro trasportatore.
Guarda una simulazione di nastro trasportatore
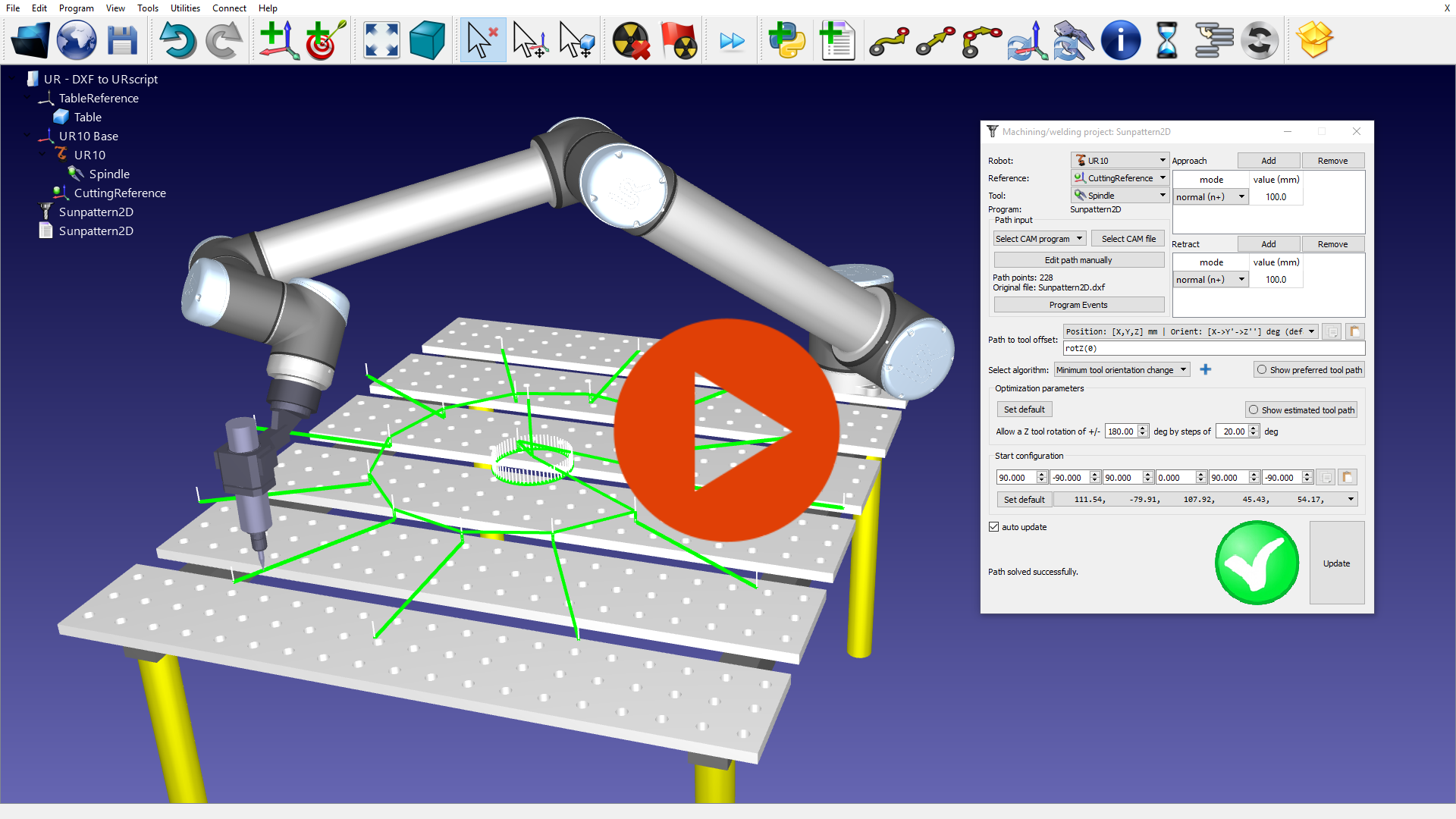
Da DXF a programma robot
Programmi robot possono essere generati da un file DXF utilizzando le funzionalità di simulazione e programmazione offline di RoboDK.
File DXF possono essere facilmente convertiti, ad esempio, in codice NC da taglio. Questo esempio mostra come convertire un file DXF e generare un programma per robot UR (SCRIPT oppure URP).
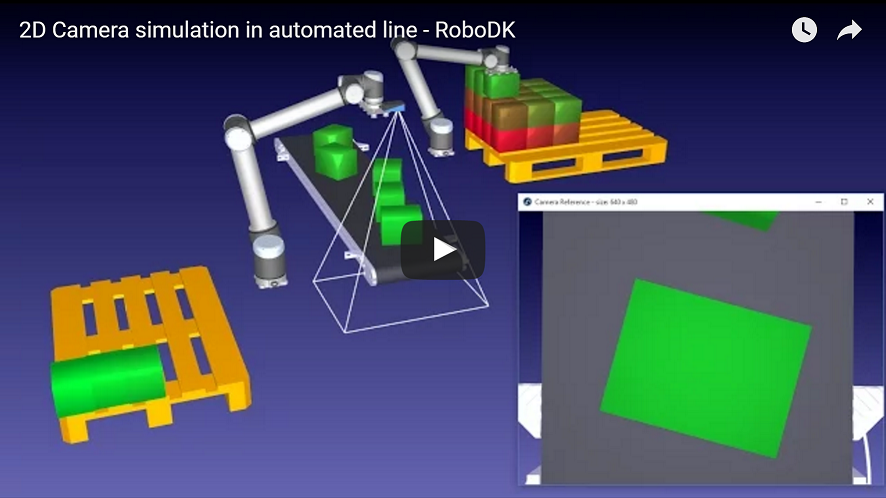
Ispezione automatizzata
L'ispezione automatizzata, conosciuta anche come visione macchina, è ora una delle tecnologie chiave nelle applicazioni robotiche di pick and place. Con il software RoboDK è molto facile simulare ispezioni tramite telecamere e scattare istantanee della simulazione. Tutte le impostazioni della telecamera possono essere facilmente modificate, come la lunghezza focale, il campo visivo, la distanza di lavoro o la dimensione del sensore. L'area di lavoro della telecamera può essere anch'essa visualizzata.
In questo esempio due robot (Universal Robot) e una telecamera di ispezione 2D eseguono un compito di pallettizzazione.
Pick and place con Python
Questo esempio mostra una simulazione avanzata di pick and place. La movimentazione del robot e la sostituzione degli oggetti è ottenuta tramite Python.
L' API di RoboDK per Python permette di programmare qualunque robot tramite Python. In aggiunta, puoi interagire con il simulatore per creare, modificare o correggere qualsiasi oggetto o robot in maniera programmatica.
Simulazione avanzata di pick and place
Primi passi con l'API di RoboDK per Python
Disegno
Un robot può disegnare automaticamente un'immagine come un artista.
Il disegno può essere ottenuto in maniera automatica utilizzando l'API di RoboDK. Utilizzando l'API di RoboDK una libreria Python di terze parti può essere usata per convertire le immagini SVG in tracciati robot.
Per saperne di più su un progetto reale
Primi passi con l'API di RooDK per Python