RoboDK Beispiele
Die folgenden Beispiele zeigen die grundlegende Verwendung von RoboDK. Die Beispiel, die in diesem Abschnitt erklärt werden sind Bestandteil des Standard- RoboDK Downloads.
Die Stations-Dateien für jedes dieser Beispiele können folgendermaßen geöffnet werden: Datei-> Öffnen - dann wählen Sie bitte das gewünschte Beispiel aus der Bibliothek.
Pick and place
Grundlegende Pick and Place Simulation.
Pick and place mit Python
Dieses Beispiel zeigt, wie man mit Python einen Roboter für eine Pick and Place-Applikation programmiert.
Zeichnen mit einem Roboter.
Zeichnen Sie eine SCG-Grafik mit Ihrem Roboter. Integrieren Sie 3rd party-Bibliotheken in Ihr Projekt.
Fräsen mit dem Roboter
Verwenden Sie Ihren Roboter wie eine CNC-Maschine. Importieren Sie einfach einen NC-Code (G-Code oder APT) und erstellen Sie ein Programm.
Förderband
Simulieren Sie ein Förderband oder ähnliche Vorrichtungen unter Verwendung von Python API.
Roboter Programm aus DXF-Datei
Konvertieren Sie DXF-Skizzen zu Roboter-Programmen..
Milling with external axes
Synchronize a robot with external axes for milling.
Lackierung - Farbauftrag
Einfache Erstellung von Pfaden für Roboter-Lackier- und Inspektionsanwendungen
Punktschweißen
Punktschweiß- und Bohranwendungen können auf einfache Weise mit RoboDK durchgeführt werden
3D-Druck
3D-Druck mit einem Industrie-Roboter in wenigen Schritten.
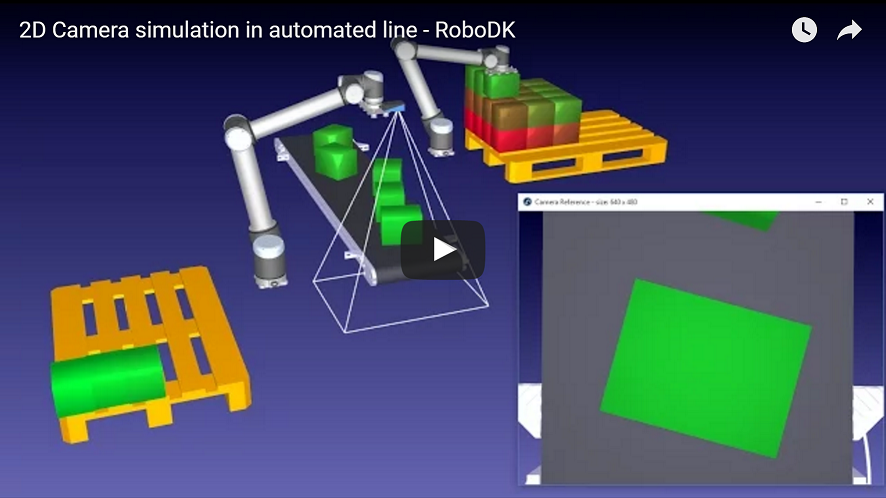
2D Vision Simulation
Simulation von 2D-Kameras mit integriertem, automatisiertem Pfad mit RoboDK.
Pick and place
Diese Beispiel zeigt ein einfaches Pick and Place-Programm, bei dem vier Bälle von einem Tisch zu einem anderen bewegt werden unter Verwendung eines pneumatischen Saugkopfes.
Dieses Tutorial zeigt eine generelle Interaktion mit dem Simulator für Offline-Programmierung von RoboDK.
Pick and Place mit Python
Dieses Beispiel zeigt eine fortgeschrittene Simulation einer Pick and Place-Anwendung. Die Roboterbewegung und das Ersetzen von Objekten ist durch Python-Befehle umgesetzt.
The Die RoboDK Python API erlaubt die Programmierung jedes Industrieroboters mittels Python. Zusätzlich können Sie mit dem Simulator interagieren, um Objekte oder Roboter durch Programmierung zu erstellen oder zu modifizieren.
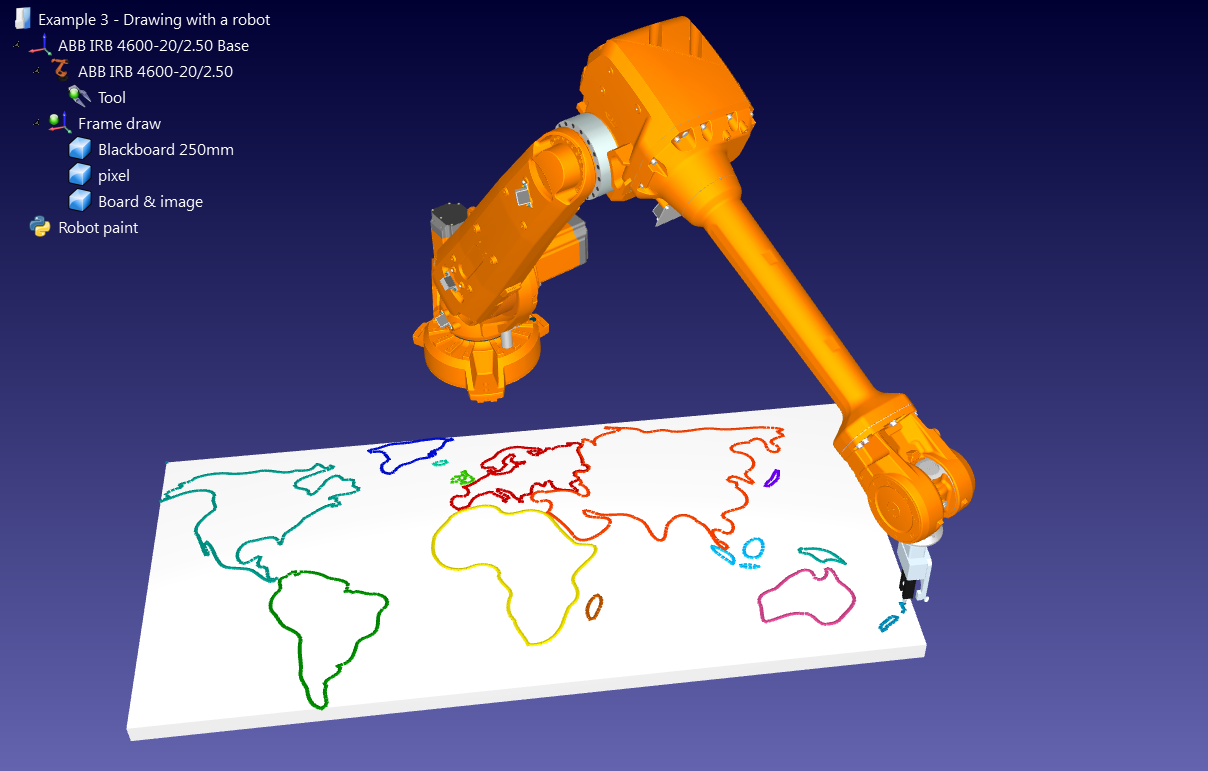
Zeichnen mit einem Roboter
Dieses Beispiel zeigt wie Sie eine Lackier- oder Zeichen-Anwendung mit RoboDK umsetzen.
Der Roboter ist programmiert eine SVG-Skizze zu zeichnen. Die Zeichnungs-Simulation wurde erzielt durch die Verwendung der Python API und eines Referenz-Objektes "pixel", dass dem Board hinzugefügt wird, wenn sich der Roboter bewegt.
Eine 3rd party-Bibliothek wird verwendet, um SVG-files in Roboter-Koordinaten umzuwandeln.
Roboter-Fräsung
Das Roboter-Fräsungs-Feature erlaubt es Ihnen jeden Pfad für Fräs-, Schweiß-, Lackier- oder Inspektions-Anwendungen zu simulieren und zu optimieren. Sie können auf einfache Weise Roboter-Pfade entlan Kurven und Punkten erstellen unter Verwendung von CAD-Dateien (STEP und IGES-Dateien werden unterstützt).
Mit RoboDK können Sie auch NC-Maschinen-Programme(wie z.B. G-Code und APT-Dateien) zu Roboter-Programmen umwandeln. RoboDK verhindert automatisch Singularitäten, Gelenk-Limitierungs-Probleme und Kollisionen.
Förderband
Jede Art von Vorrichtung wie z.B. ein Förderband können mittels Python API simuliert werden. Dieses Beispiel zeigt, wie universelle Roboter (UR10) zusammenarbeiten, um Teile mittels einem Förderband zu transportieren.
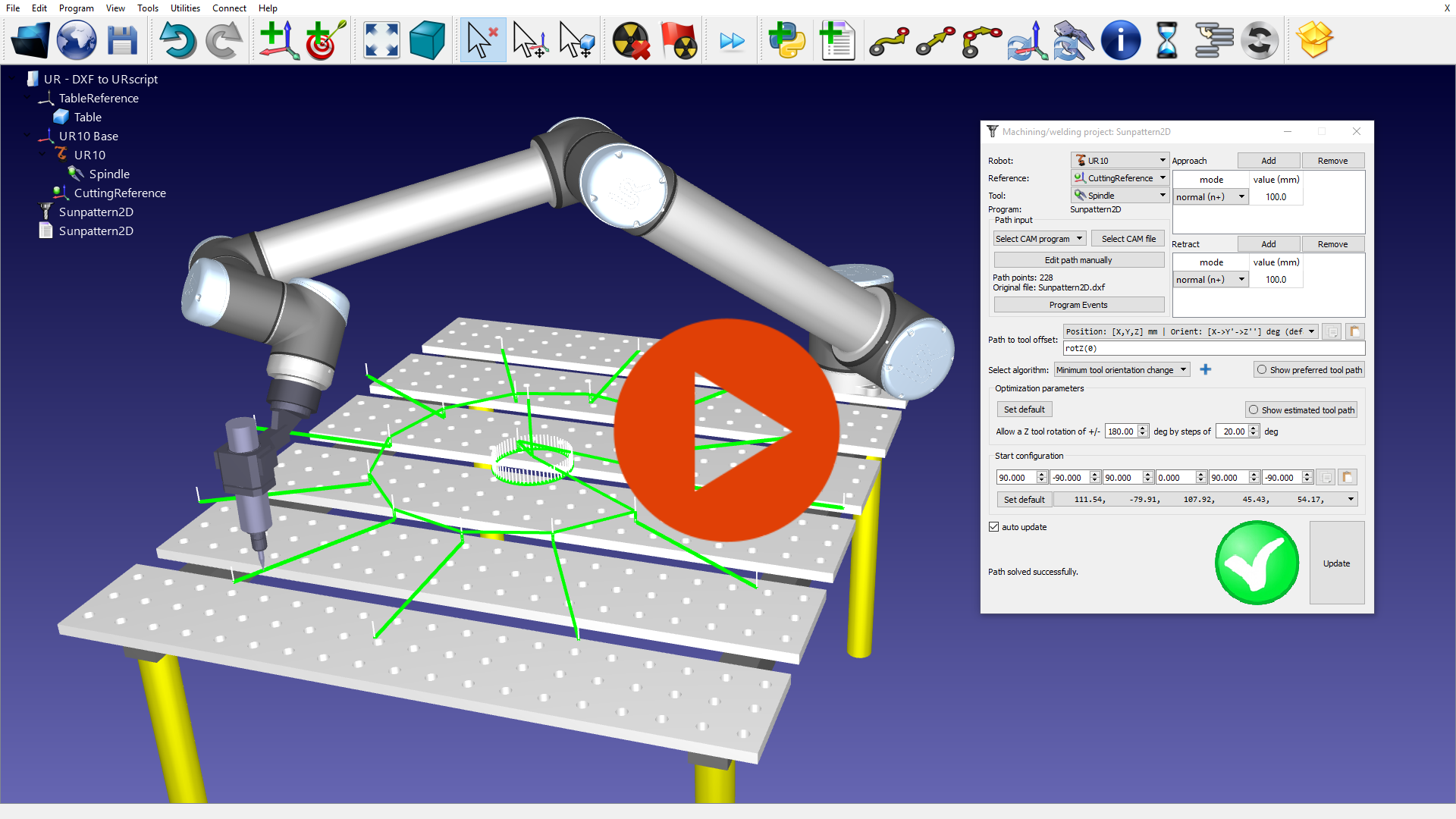
DXF zu Roboter-Programm
Ein Roboter-Pfad kann aus einer DXF-Datei erstellt werden. Dieses Feature ist hilfreich für Pfade auf einer Ebene, um z.B. 2D-Schneidanwendungen einfach zu ermöglichen. In diesem Video verwenden wir einen UR10-Roboter und ein DXF-file, um ein URscript-Programm zu erstellen.
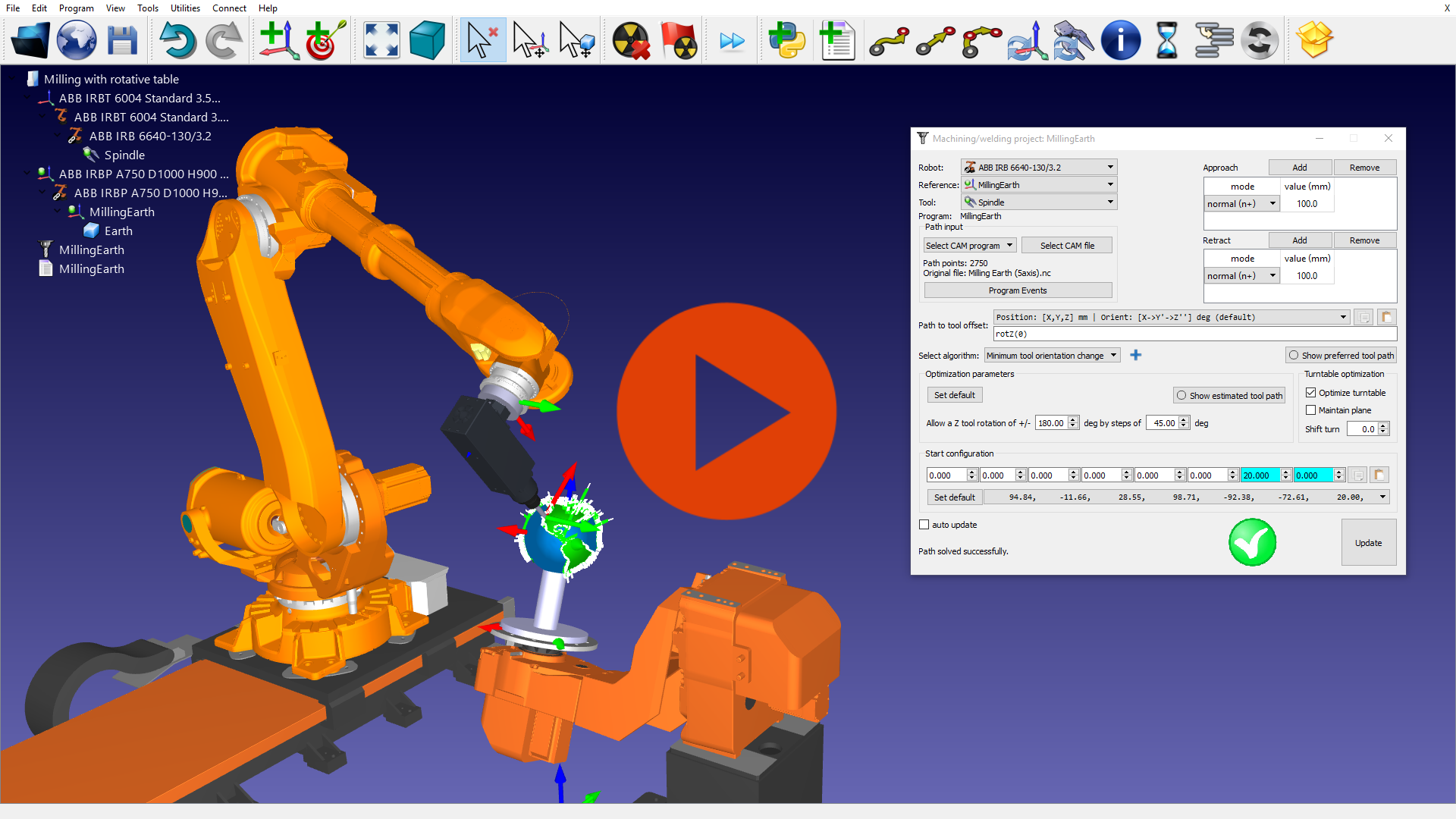
Roboter-Fräsung mit externen Axen
Externe Axen können erstellt und mit dem Roboter synchronisiert werden. Dieses Beispiel verwendet einen ABB-Drehtisch, um ein kugelförmiges Teil herzustellen.
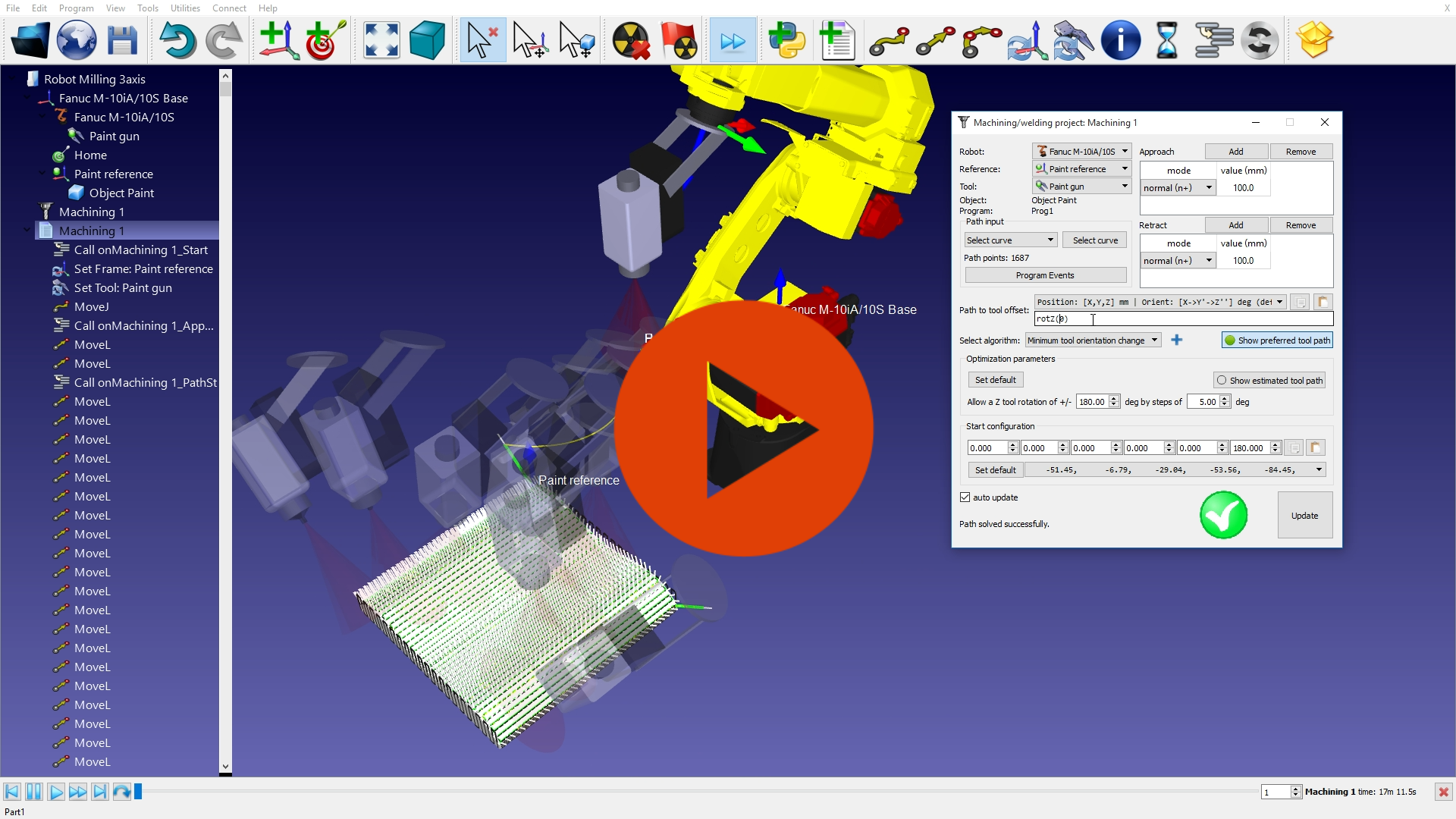
Roboter-Lackierung (Farbauftrag)
RoboDK kann verwendet werden, um Pfade entlag Flächen zu erstellen - z.B. um einen Zick-Zack-Pfad für eine Lackier- oder Inspektions-Anwendung zu generieren. RoboDK verhindert automatisch Singularitäten, Gelenk-Limitierungs-Probleme und Kollisionen.
Ziele auf einer Fläche können auch in wenigen Schritten erstellt werden. (Menü "Programm"->"Teach Ziele auf Flächen").
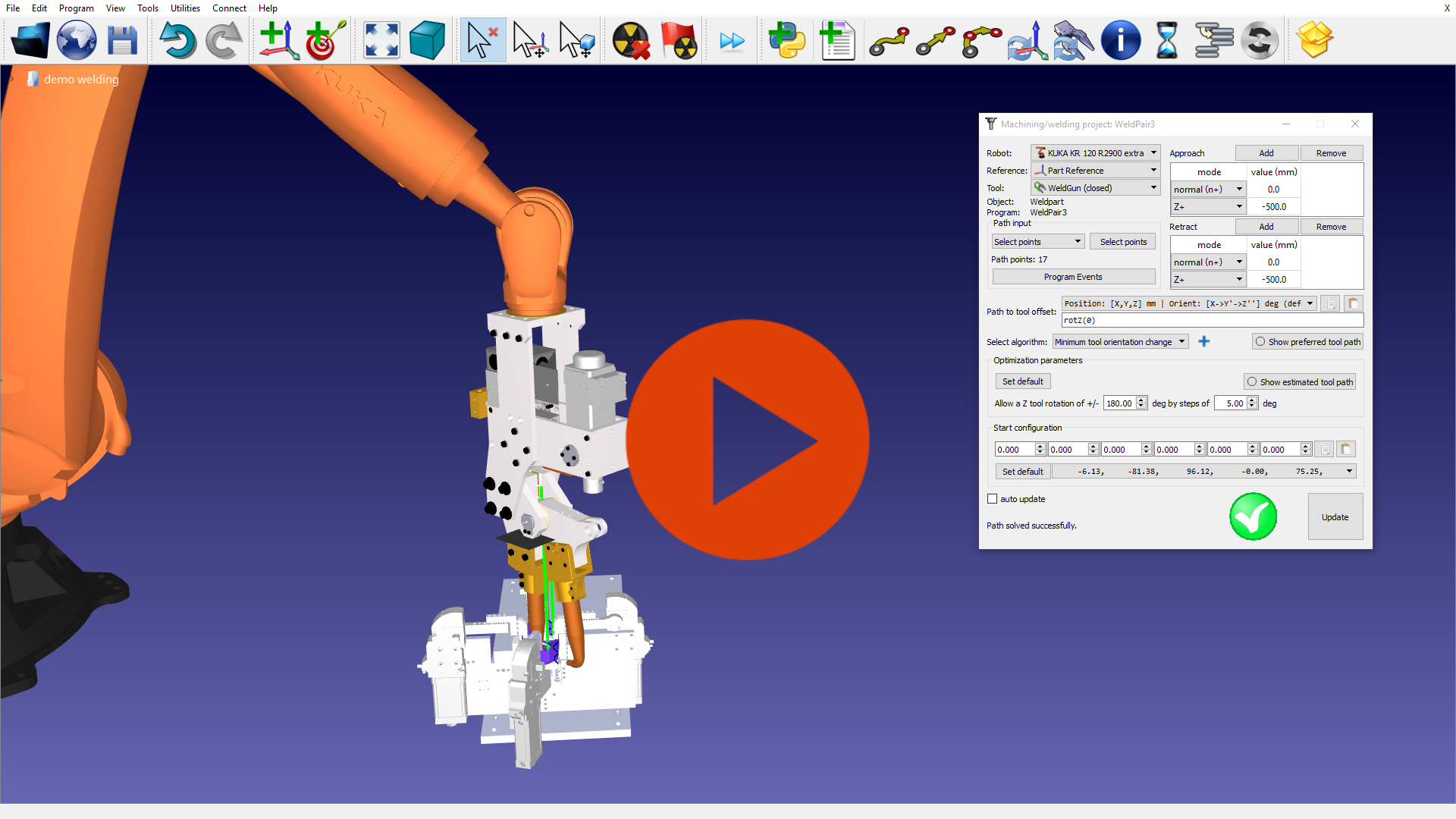
Punkt-Schweißen
Punkt-Schweißungen können einfach durchgeführt werden. Es ist auch möglich Punkte oder Kurven als Textformat oder Maschinen-Code (NC-Code: G-Code, APT,...) zu importieren. Die gleiche Funktion kann auch verwendet werden, um Bohrungen auf definierten Punkten zu automatisieren.
Dieses Video zeigt eine Punktschweißanwendung unter Verwendung eines Kuka Roboters und einer HMD Technolgy Schweiß-Pistole.
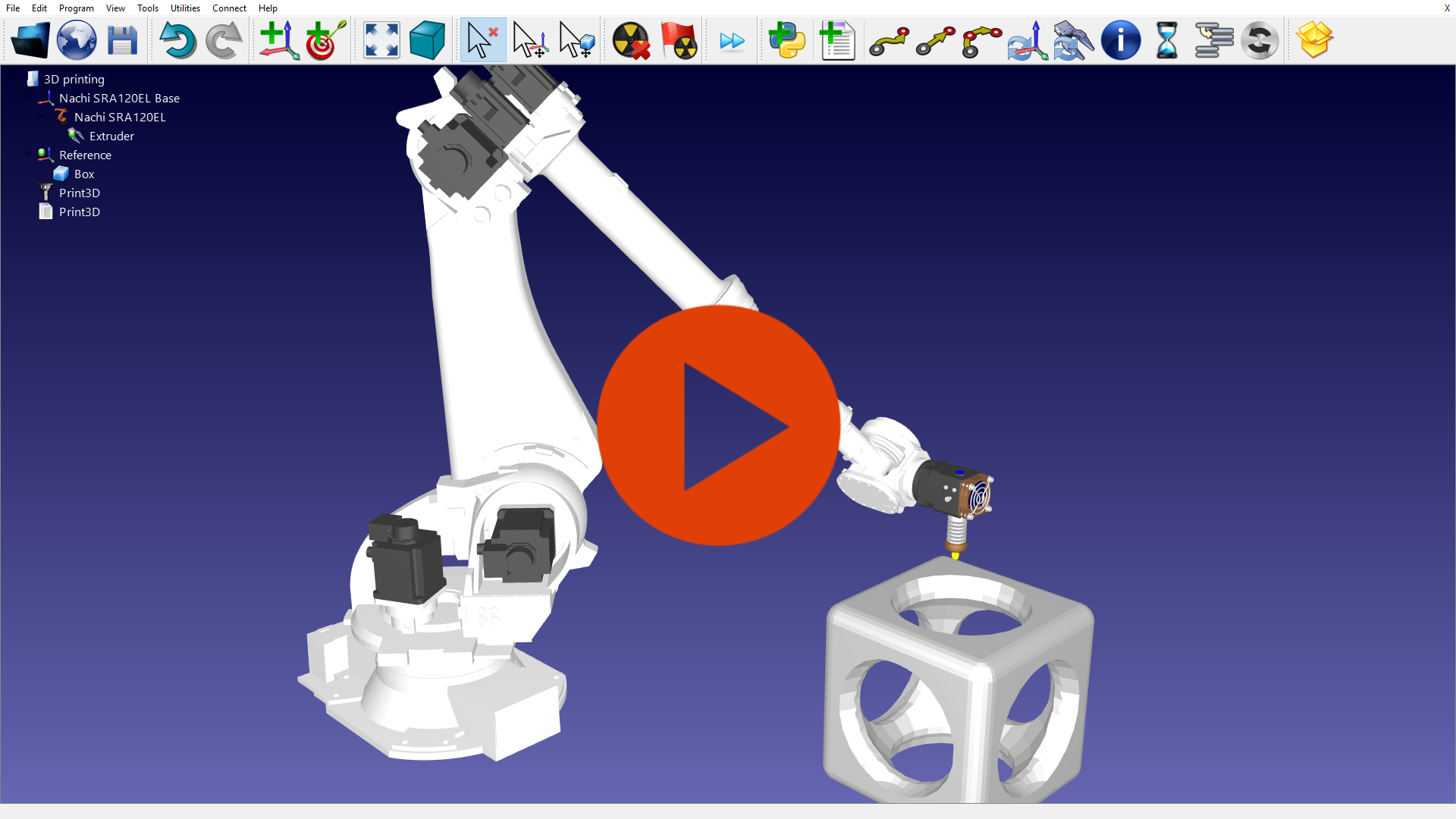
3D-Druck mit einem Roboter
3D-Druck mit einem Industrieroboter kann auf einfache Weise unter Verwendung von RoboDK durchgeführt werden. Ein 3D-Objekt (wie z.B. ein Stl-file) kann zuerst in verschiedne Layer aufgeschnitten werden. Dann kann der 3D-Druck mittels Roboter simuliert werden.
Sie können dann das geeignete Programm erstellen, sobald Sie mit dem Ergebnis zufrieden sind. In diesem Beispiel verwenden wir einen Nachi-Roboter, um einen 3D-Würfel zu erstellen.
Kamera Inspektion
Zwei Universal-Roboter und eine Sick 2D-Inspektions-Kamera durchlaufen eine Palletier-Anwendung. Es ist sehr einfach mit RoboDK 2D-Kameras mit einem automatisierten Pfad zu simulieren.
Bei Anwahl aus dem RoboDK-Menü: "Verbinden und Simulieren von 2D-Kameras" können Sie eine Vorschau der Kamera sehen. Die Kamera kann durch den Roboter gehalten werden oder statisch in der Zelle platziert sein.
Die Kamera-Einstellungen können manuell vorgenommen werden oder durch Python Script unter Verwendung der RoboDK API. Kamera-Einstellungen wie, Sichtfeld, Arbeitsabstand oder Sensorgröße können auf einfache Weise eingestellt werden. Der Arbeitsbereich der Kamera kann auch dargestellt werden.