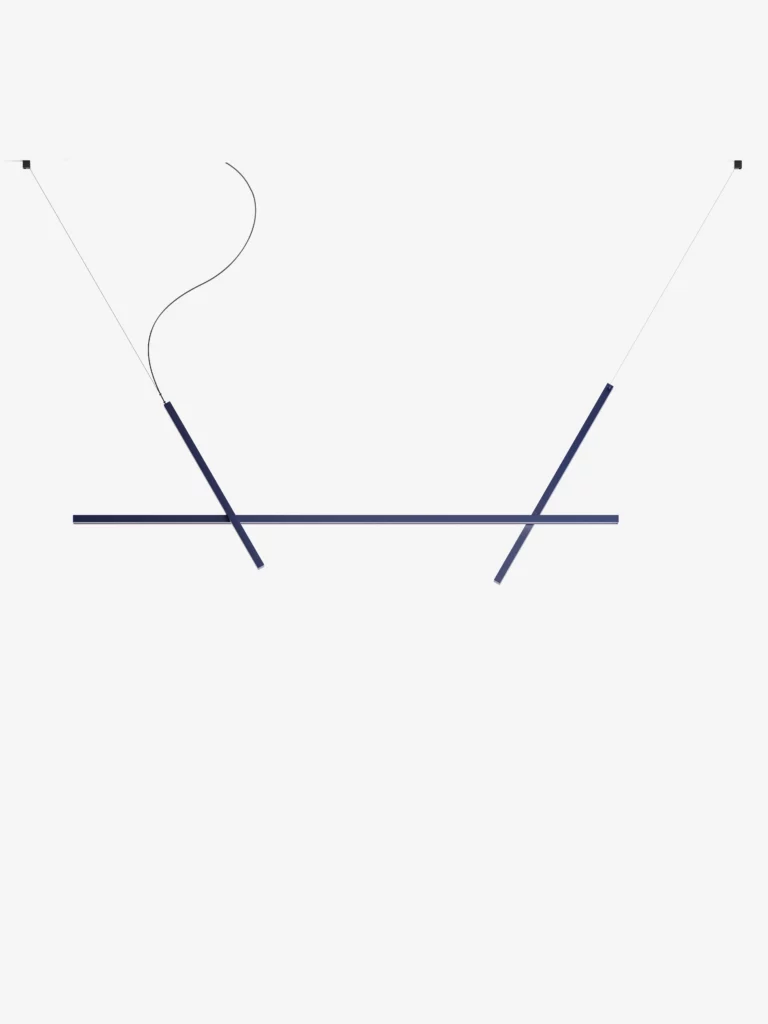
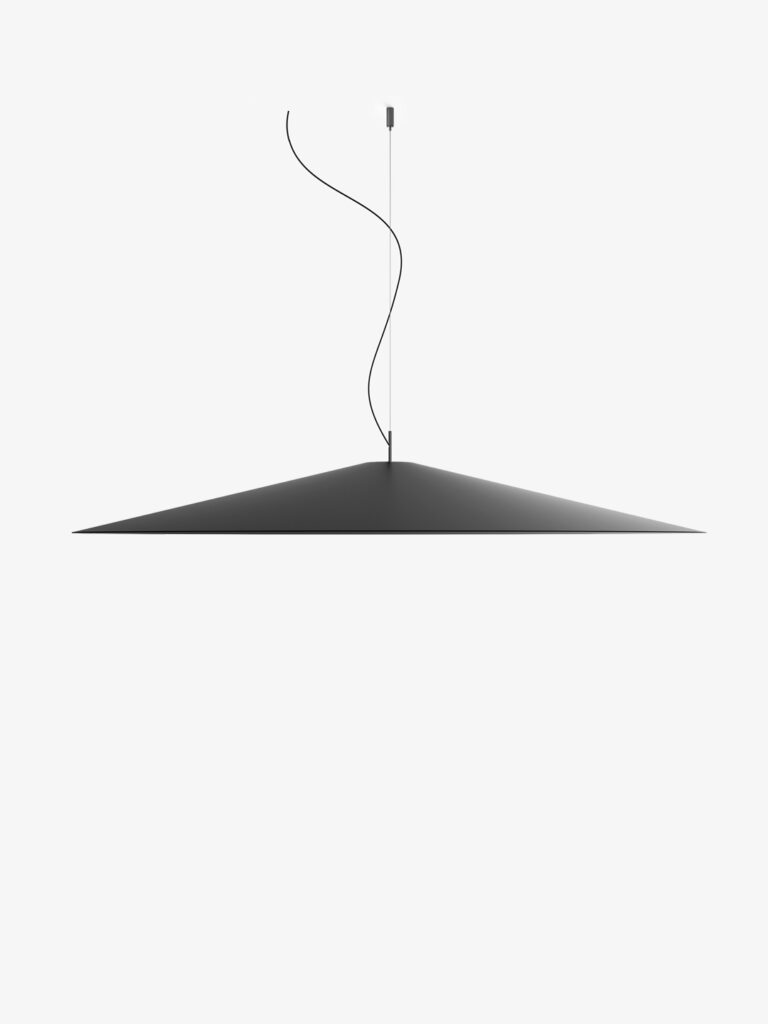
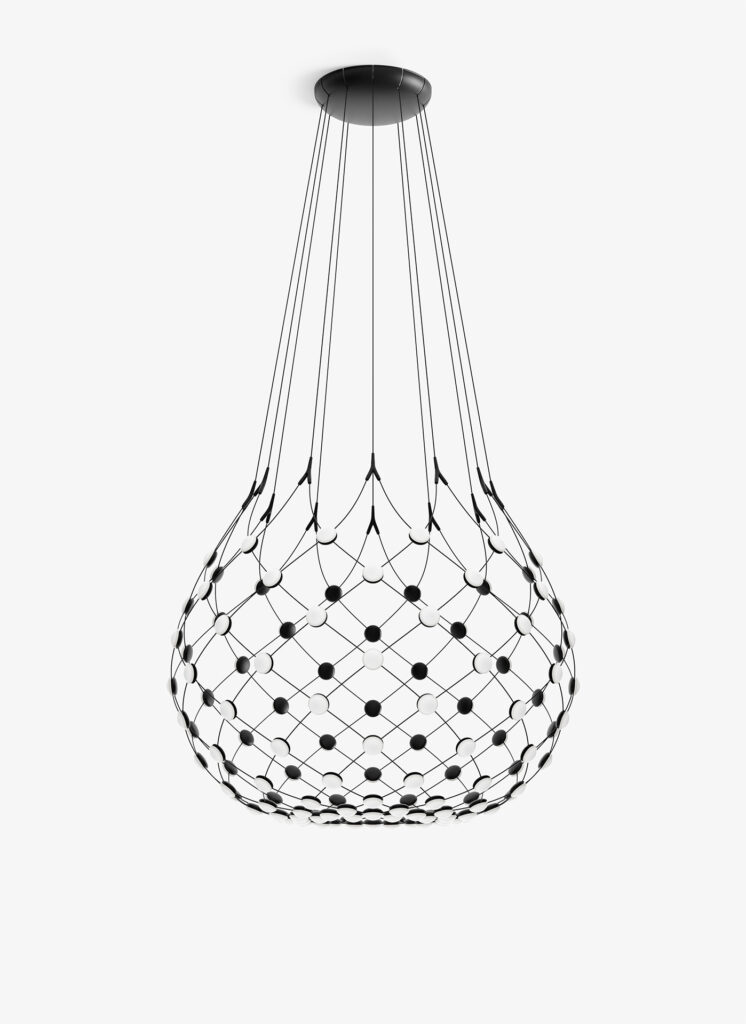
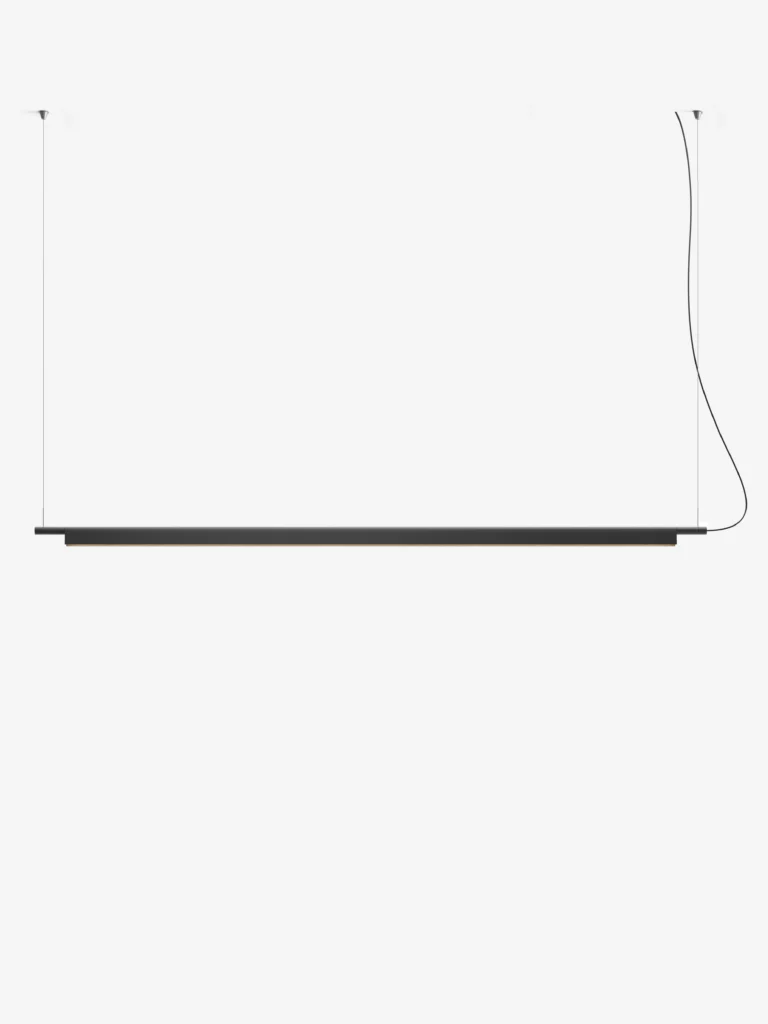
Sospensione
Frutto di un’attenta ricerca tecnica e stilistica, le lampade a sospensione Luceplan sono caratterizzate da una forte identità decorativa e alte prestazioni in termini di illuminazione.
Si tratta di soluzioni dal forte impatto visivo in grado di personalizzare spazi sia residenziali che pubblici, adattandosi alle diverse esigenze installative e architettoniche.

































































Lasciati ispirare dalle nostre soluzioni di illuminazione
Offriamo le soluzioni per ogni spazio, sia per ambienti pubblici o privati. Scopri le nostre referenze e lasciati ispirare.
Scopri i progetti
Scopri tutte le collezioni
Scarica il nostro catalogo e scopri tutte le nostre collezioni.
Download